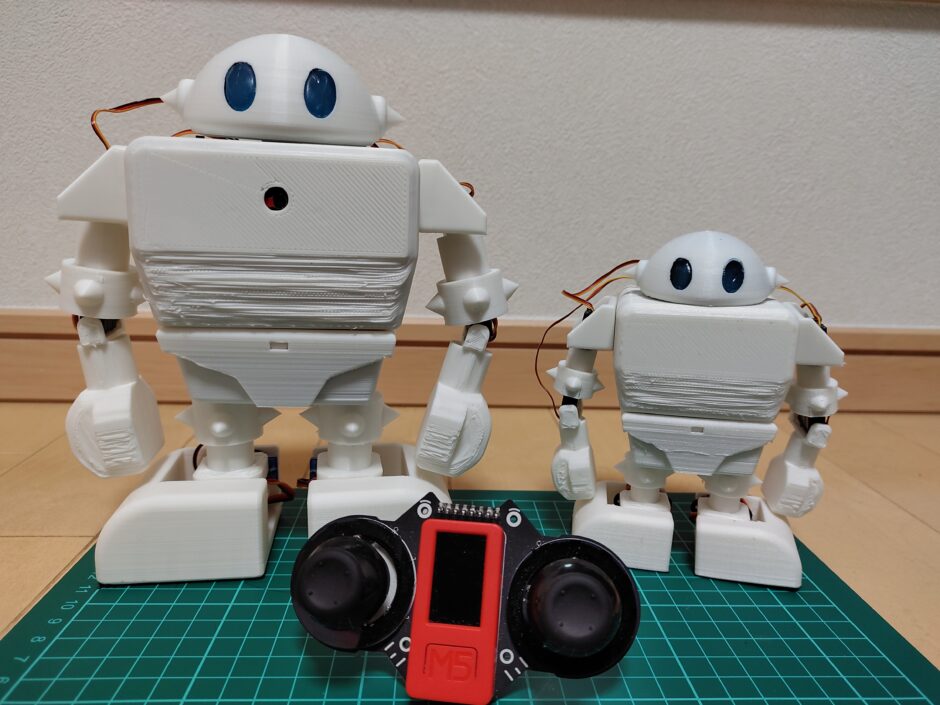
先日、多関節(といってもロボコンに出ているようなクオリティではありませんが(-_-;))2足歩行ロボットを作成しました。パワー、のポーズを取り入れたので、パワー君と名付けました。↓

マイコンボードにはRaspberryPi ZERO2を使用していまして、サーボモーターもSG90を採用した事からそこそこの大きさとなっております。
今回はこれを手乗りサイズにすべく小型化を図り、「パワー君mini」を作成しましたので、ここで詳細をまとめておこうと思います。
3DCADデータの倍率を小さくして印刷すれば楽勝でしょ、と思っていましたが、大苦戦しました。。
目次
CADデータの作成
パワー君のスケッチを縮小
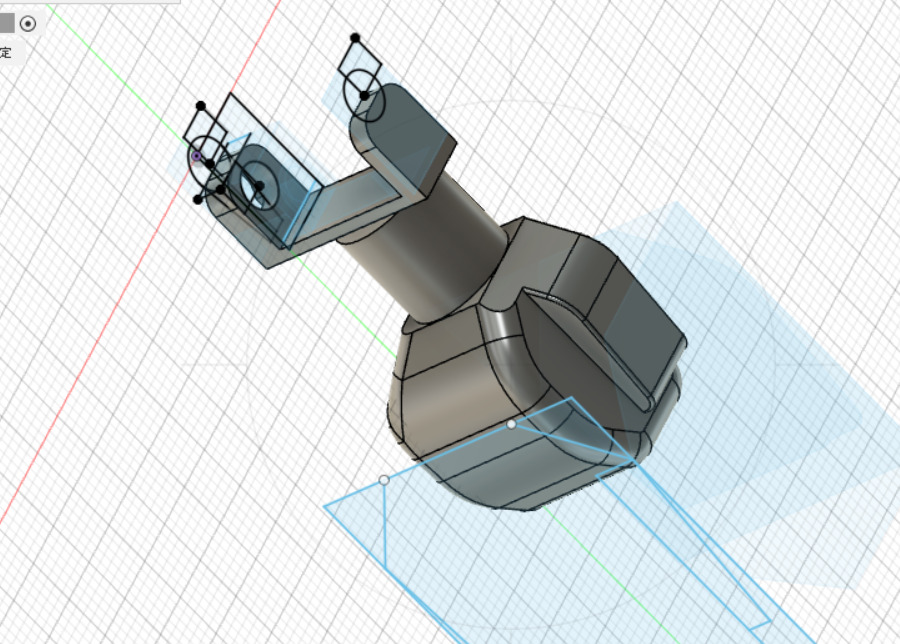
CADソフトはFusion360を使っているのですが、すでに存在するボディの倍率を変更することは簡単に出来るようです。
画面上部の修正タブから尺度を選択し、スケッチのボディをクリックすると、尺度の変更で形はそのままで倍率が変更できます。
尺度のタイプを不均一にすれば、X,Y,Z方向を、別々の倍率で変更する事もできます。
今まで知りませんでしたが、とっても便利な機能でした。
これなら、一から作る必要もないので楽勝だなと思っていましたが、思わぬ落とし穴がありました。
板厚も縮小しちゃう
ってあたりまえの事ですけども、これがハマりました。
元々のボディの板厚が1mmだったりすれば、50%の縮小で0.5mmとかになっちゃうのでぺらんぺらんです。
形状がそのまま縮小されるのはほんとに助かりましたが、その後の板厚の修正にかなり時間を割かれました。
またスケッチを書くはめになりますし、すでにスケッチがスケッチだらけ(語彙(-_-;))なので、なかなか思う通りに修正することが出来ませんでした。
部品の小型化
全てミニサイズに
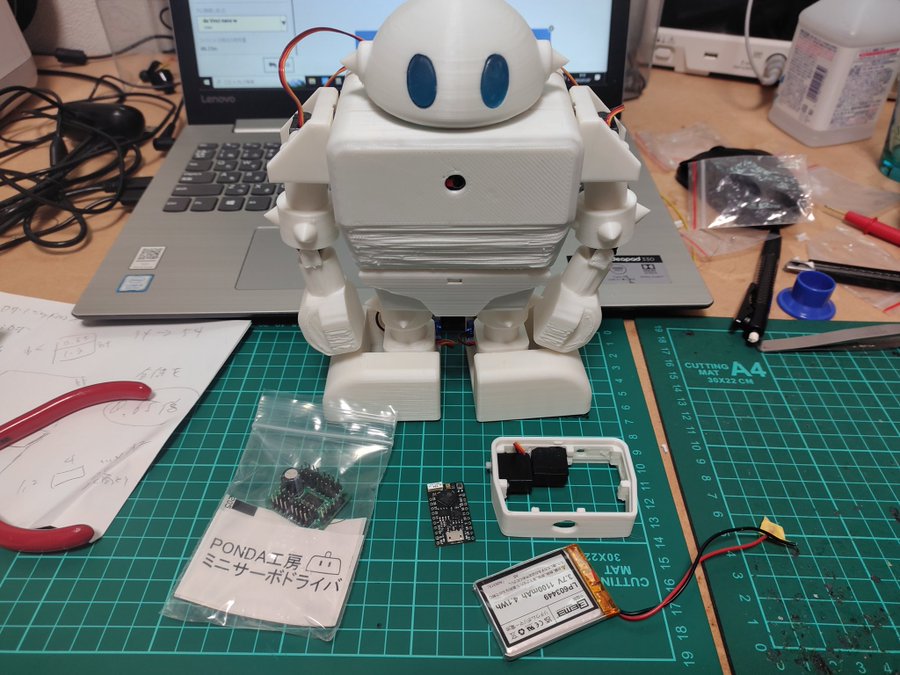
マイコンボードにはtinypico、サーボドライバは@PONDAさんのminiサーボドライバを使用しました。
これにLIPOバッテリが納まる大きさを計算したところ、約60%の大きさまで縮小する事ができました。
サーボモーターもアリエクで小型の物を購入しました。
・RaspberryPi ZERO2 ⇒ tinypico
・PCA9685 ⇒ miniサーボドライバ
・lipo2000mAh ⇒ lipo1000mAh
・SG90 ⇒ ミニサーボ
またまたスケッチ変更
基板、バッテリーの収納部分は簡単に修正出来ましたが、サーボモーターの格納部が大変でした。
SG90の部分を全てミニサーボの形状に変更が必要でしたので、これまたかなりの時間を割きました。
スケッチ⇒印刷⇒ちょっとおかしい、、の繰り返しで気が付けばフィラメントを1ロール使い切っていました。(;^ω^)
ただ縮小するだけでも、結構、いやかなり大変だという事が身に染みて分かりましたね。
そんなこんなで少しずつ形に
パーツがほぼ完成
部品が納まり、仮組したところ、なんとか形になってくれました。
それでは地獄の配線作業。
配線
これまだ途中です。これに頭、肩、ひじのサーボモータが追加されるので、中身はカオス オブ カオスになっております。。
歩行テスト
無事歩いてくれました。
残りの部位を組み立てていきます。
最終組み立て
キャーーー配線カオスーーー!!!!汗
完成
とりあえず完成しました。
アナログコントローラーで各部位を動かしてみます。
良い感じです。
続いて、パワー君親子でシンクロさせてみます。
以上でございます!ありがとうございました!
※プログラムは冒頭の過去記事のアナログ操作バージョンとほぼ同じですので割愛します。

