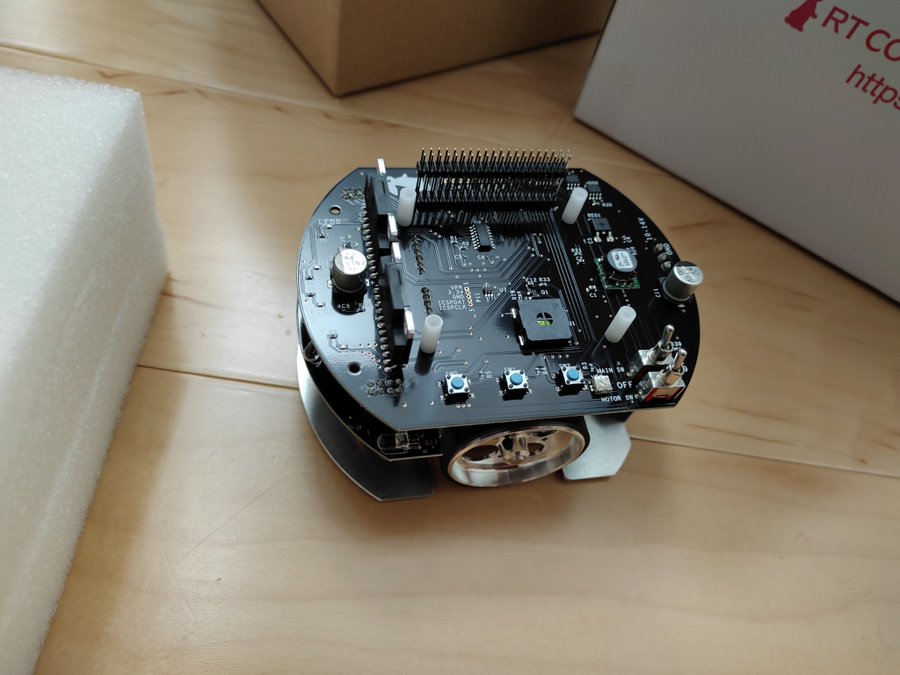
ROSの勉強をする為に、アールティ社のRaspberry Mouceを購入しました。
価格は6万強しましたので正直躊躇しましたが、買ってしまえば勉強せざるを得ない状況に追い込まれるので、逆に良かったとも思っています。
さて、ROSを勉強するつもりでRaspberry mouceを買った訳ですが、何から進めればいいのかよく分からないので、下記の本を参考にしました。↓
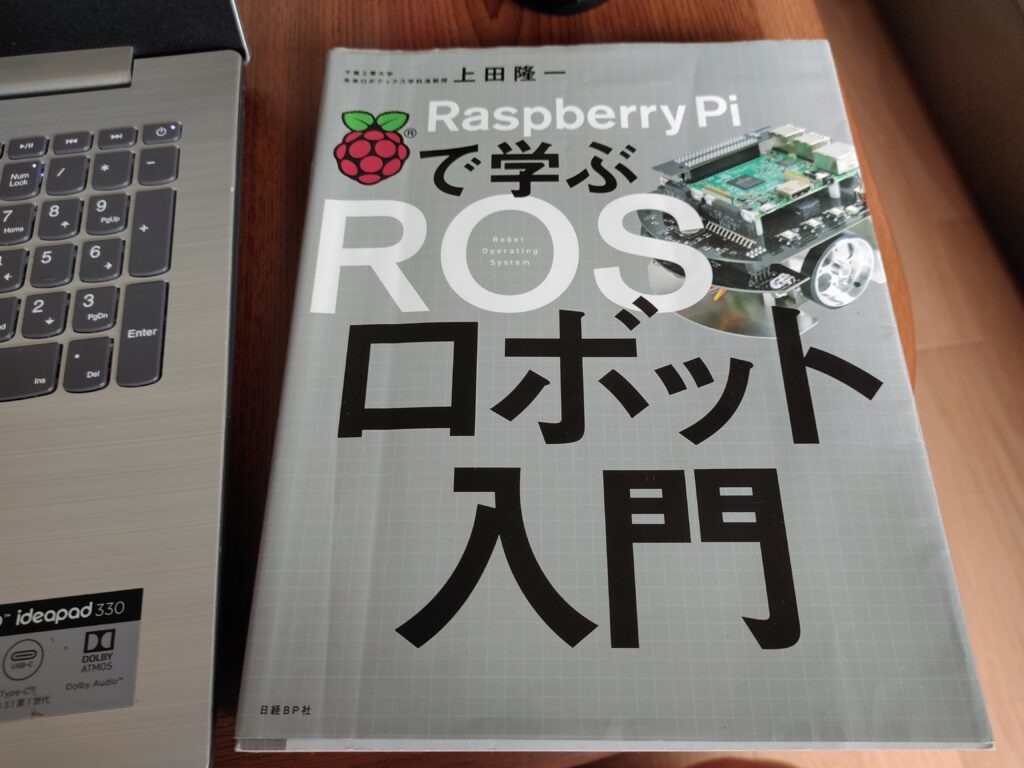
しかし、けっこう前の本なのでのOSのバージョン等が古く、そのまま進めても上手く動作しませんでした。(モーターが動かない。。)
自分のセットアップ方法にどこか手違いがあった可能性もありますが、数回初めからやりなおしても同じでしたので、バージョンは最新にして進める事にしました。
有難い事に、アールティ社の公式サイトにてubuntuの最新ver20.04でのRaspberry mouceセットアップ方法が掲載されていますので、その通りに進めればubuntu,デバイスドライバ,ROSのインストールまで出来ます。
ただし、こちらの方法でも一部うまく行かない箇所があったので、今回はその辺をまとめておこうかと思います。
はじめに
ハードウェアの構成は以下の通りです。
・Rarpberry Pi 3B
・Raspberry MouceV2
・SDカード 16GB
OS、デバイスドライバのインストール
冒頭のアールティ社のサイト通り、ubuntun 20.04をインストールします。
WIFIの設定方法も丁寧に記載されています。
デバイスドライバに関しては、起動するたびにインストールする方法しか書かれていませんでしたので、こちらは冒頭の本を参考に、起動時に自動でデバイスドライバをインストールするシェルスクリプトを作成しました。
サンプルプログラム
この段階で、ROSではありませんがRaspberry Mouceをサンプルプログラムで動作させる事が可能です。
ROSのインストール
続いてROSのインストール。こちらもサイトの手順通りで問題ありません。
ただし、ROSのパッケージインストールの際、途中でフリーズする現象にはまりました。
調べてみるとラズパイのメモリ1GBが使用率100%になっていました(;^ω^)
どうやらラズパイ3の場合、インストール時に一気に4コア並列で動かしてしまうようで、1GBのシリーズではこういった症状に陥りやすくなるようです。
回避方法として、コマンドの最後に「-d2」を入れるとインストール時でも2コアの縛りをかけれるようなので、これを使用することで私の場合は無事インストールする事ができました。
ROSのサンプル
この段階で、ROSのサンプルを動かすことができます。
イメージのバックアップ
これでubuntu,デバイスドライバ,ROSのセットアップが完了しましたが、結構時間がかかります。2時間弱?はかかりますので、一旦イメージのバックアップを取る事をお勧めします。
私の場合、この後にBluetoothを認識させたくて色々パッケージをインストールしたり、設定をいじくったりしていたのですが、それが原因?でサンプルが動かせなくなりました。(pimouceの制御がおかしくなりました。)
再度初めから環境を構築するハメになりますので、結構地獄です。
サンプルプログラムの応用
次回、サンプルプログラムの応用で色々やってみましたので、その方法についてまとめようかと思います。
ROSについては、その後まとめようと思います。

