前回、TinyPicoのセットアップについてまとめました。↓

残すところ、小型化できていないのはサーボモータドライバのPCA9685だけとなりました。
しかし、困った事にネットを探してもPCA9685より小さいサーボモータドライバは見つかりませんでした。(URATで制御するようなやつはあったけど、使い方が分からん(-_-;))
恐らく、I2Cで制御するサーボドライバはPCA9685が今のところ最も小型なんだと思います。
ここで、「無ければ回路書いて基板を作るぜ!」って出来ればかっこいいのですが、生憎そんな技術は持ち合わせておらず。。
苦肉の策ですが、PCA9685を加工してみる事にしました。
今回は、その「苦肉の策」についてまとめさせて頂こうかと思います。
PCA9685について
回路を見てみる
tweetの通りですが、PCA9685の右半分は、サーボの9~16チャンネル、i2cのアドレス設定(パターン短絡で設定可能)、i2cの連結部分(他のデバイスを数珠繋ぎできる)になります。
サーボモータの9~16チャンネルは使わず、i2cのアドレスもデフォルトのままで、他のi2cデバイスを連結させないのであれば、この部分はオープンの状態です。
つまり、「無い」とみなしていい訳です。
ということは、切っちゃえばいいんじゃないかと。。かなり強引な考えですが(-_-;)
PCA9685の加工
下準備
チップ部品やピンソケットは切り落とす時に邪魔なので、一旦全て半田こてで取り外します。
それでは、コーナンに行ってきます。コーナンに行けば、無料で電ノコとかを使わせてくれます。
私は以前、モーターのシャフト(鉄)を手動ののこぎりで切り落とした経験があるので、樹脂で出来た基板なぞ屁こいてプーのはず。
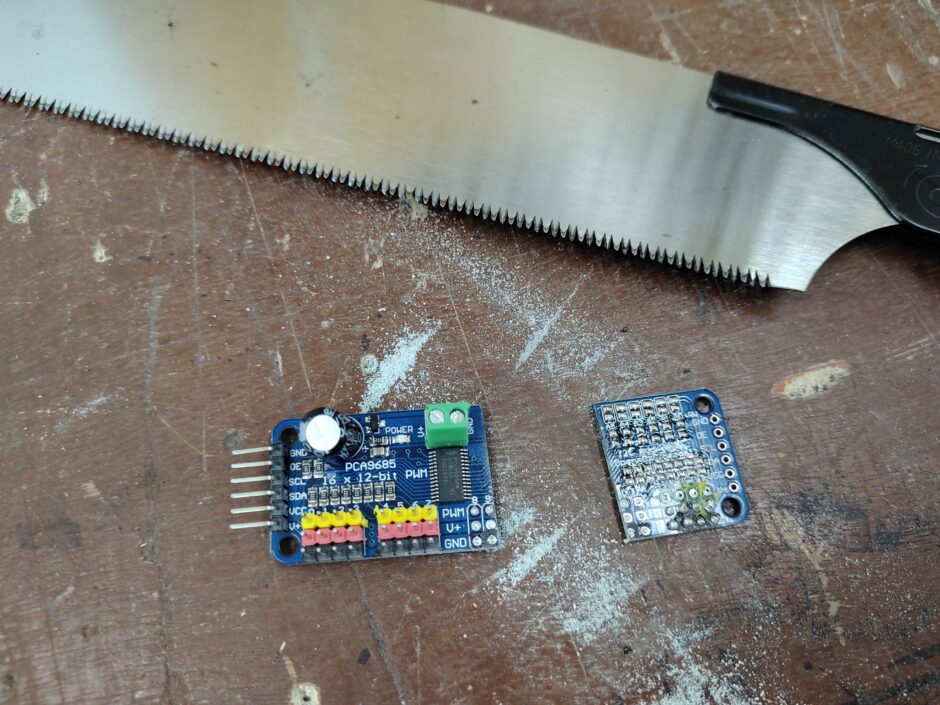
加工開始
初めにカッターナイフで切り込みを入れて、その後、のこぎりでぎこぎこやります。
成功です。とりあえず、カットできました。基板って、めっちゃ簡単にのこぎりで切れる事がわかりました。(まあこんな事2度としないだろうけども(-_-;))
切り落とした箇所は、前途した使い方であれば回路的に切り離しても問題ないと分かってはいても、一抹の不安はよぎります。なんてったって、のこぎりで切断していますから。。PCA9685もこんなことされるとは夢にも思わな勝手でしょうね。。
それでは、帰って動作確認をします。
カット後PCA9685動作確認
正常に動いているであります!
ふっふっふ、、成功しました。
ご覧の通り、マイコン、ドライバ、サーボ、BT、全てが小さくまとまっております。
役者はそろいました。動作確認もOK。いよいよ本格的にロボットの作成に取り掛かれます。
まずは外観の作成から。
次回は3DCADでロボットの筐体をスケッチし、3Dプリンタで印刷していきます。

