目次
誘導電動機のしくみ
「誘導電動機」は洗濯機や掃除機など私たちの身近なところでよく使われています。
ここでは誘導電電動機のしくみを理解しましょう。
アラゴの円板
軸のついた円板と磁石を用いた図のような装置を「アラゴの円板」といいます。
磁石を円板に沿って動かすと円板に起電力が誘導されて電流が流れます。この電流と磁石の磁力によって今度は電磁力が生じ、円板は磁石につられるように回転します。

誘導電動機の原理
誘導電動機はアラゴの円板の原理を応用したものです。
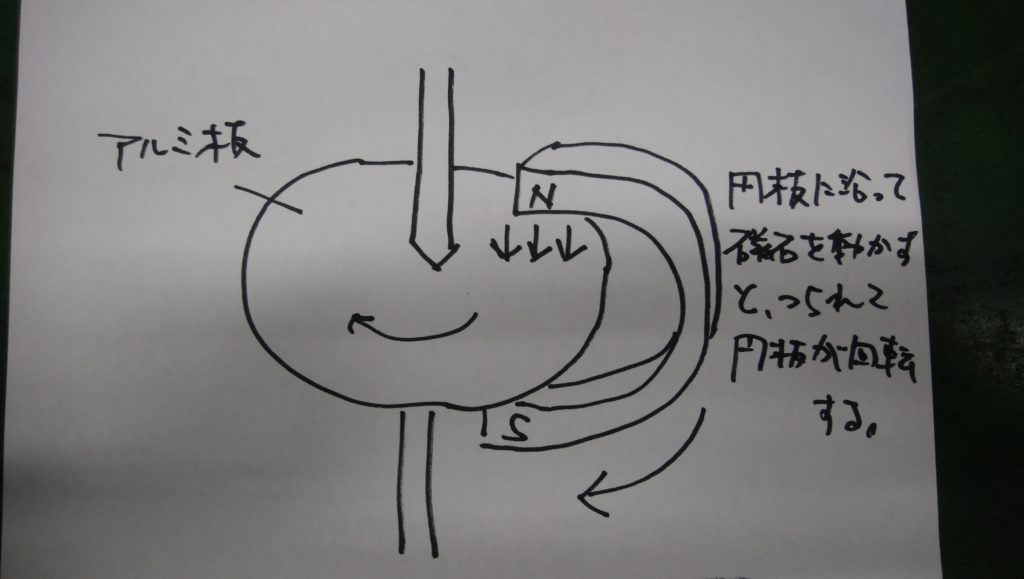
下図のように磁界のなかに閉回路にしたコイルをおいて磁界を回転させるとフレミングの右手の法則によってコイル辺に電流がながれます。
するとコイル辺を流れる電流が磁界のなかを通るので今度はフレミングの左手の法則によって電磁力が生じ、磁界の回転方向と同じ向きにコイルが回転します。
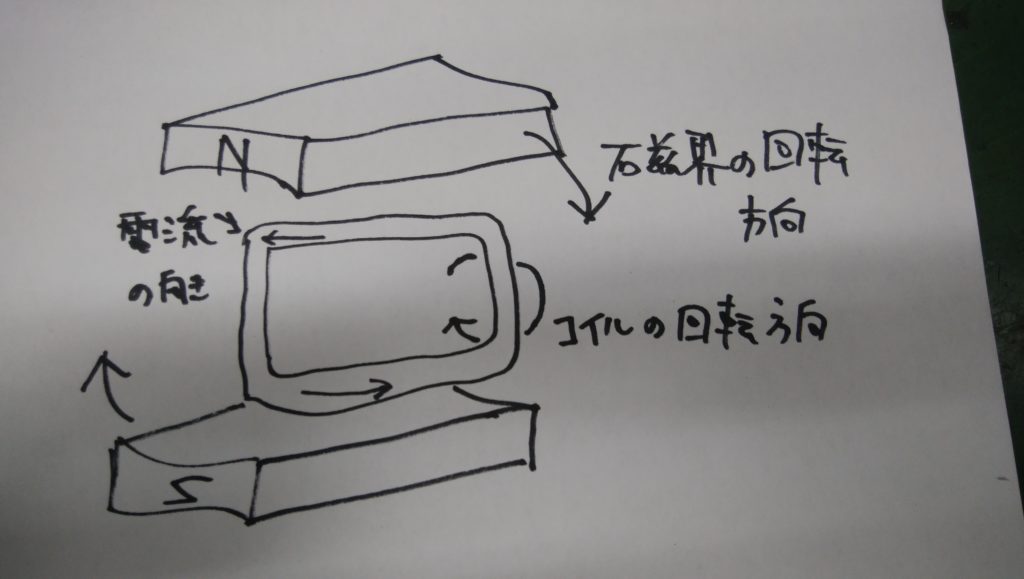
実際の誘導電動機ではコイルは円筒形の鉄心に収納されており、「回転子」と呼ばれています。
また磁界は永久磁石ではなく鉄心に巻いた巻線に電流を流してつくります。この部分は「固定子」と呼ばれます。
固定子の巻線は「一次巻線」、回転子コイルは「二次巻線」ということもあります。
回転磁界のつくりかた
回転子を回転させるには固定子の磁界を回転させなければなりません。そのため誘導電動機では「回転磁界」と呼ばれる電気的に回転する磁界をつくります。
回転磁界をつくるには図のような固定子鉄心のスロットに3組の巻線を収め、各巻線に三相交流電流を流します。すると各相の巻線には位相が120°ずつずれた電流が流れます。
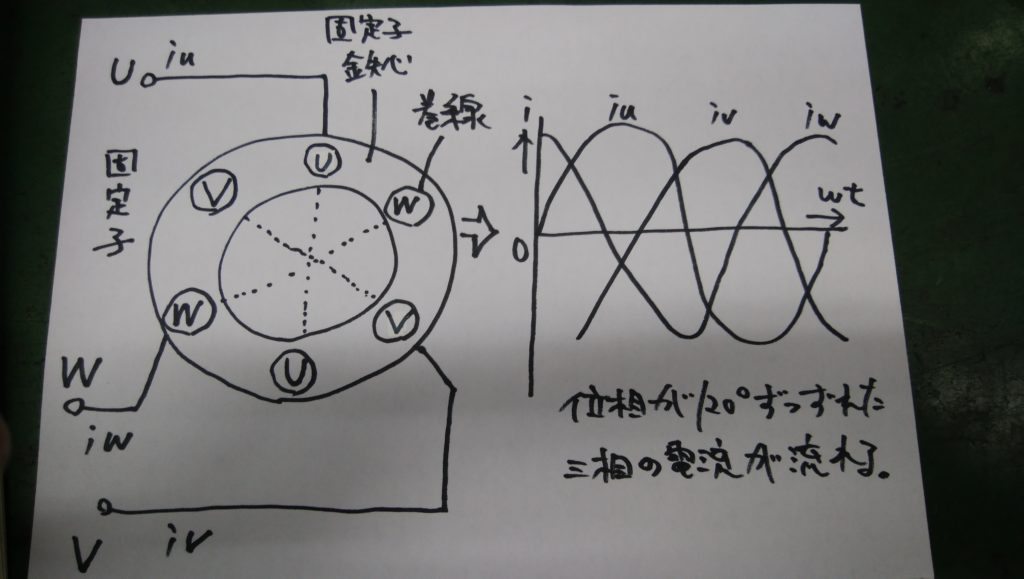
巻線の周囲にはアンペア右ネジの法則にしたがう磁束が生じます。磁束の大きさと向きはたえず変化しますが、各相の磁束を合成すると次のように時計回りに回転する磁束になります。
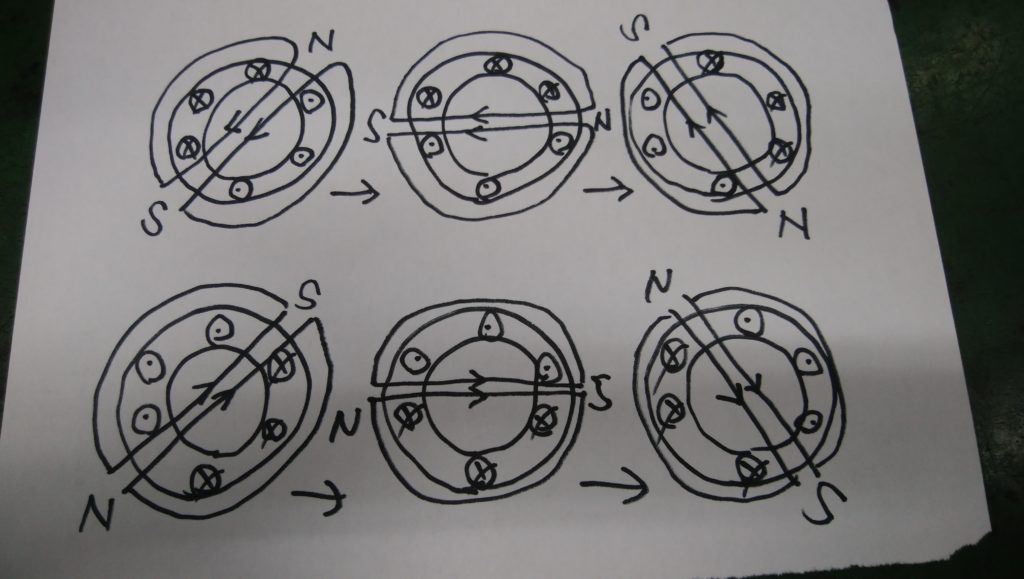
上図では固定子と磁極の数は2つですが、固定子巻線の巻数を増やすと磁極の数を増やすことができます。
磁極数をpとすれば三相交流の1周期で回転磁界は2/p回転します。

同期速度と滑り
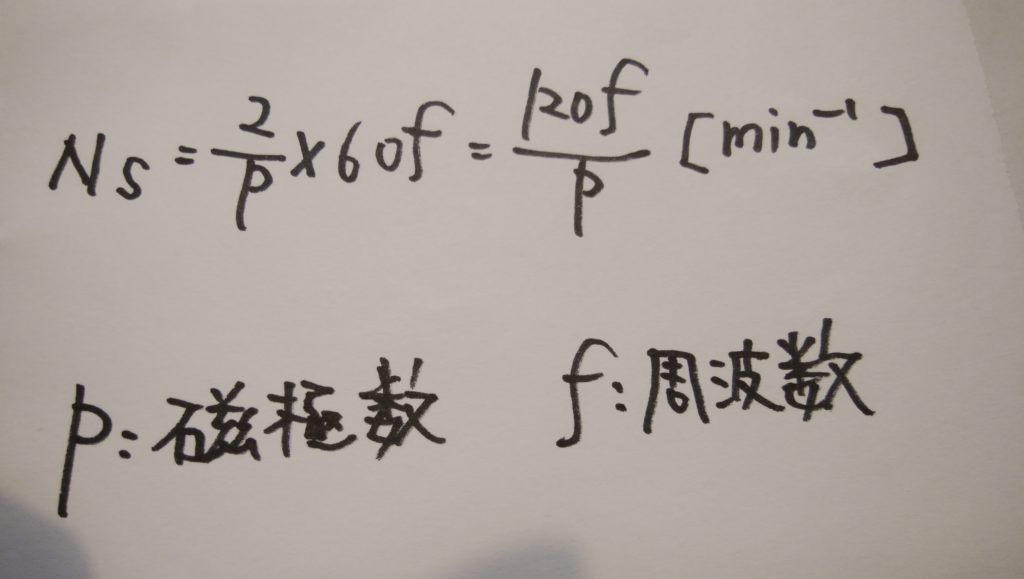
回転磁界の回転速度を「同期速度」といいます。三相交流の周波数をf(Hz)とすれば、同期速度Ns(min^-1)は、次の式で表すことができます。
回転磁界によって回転子のコイルには誘導起電力が生じ、これと固定子の磁界による電磁力で回転子が回転します。
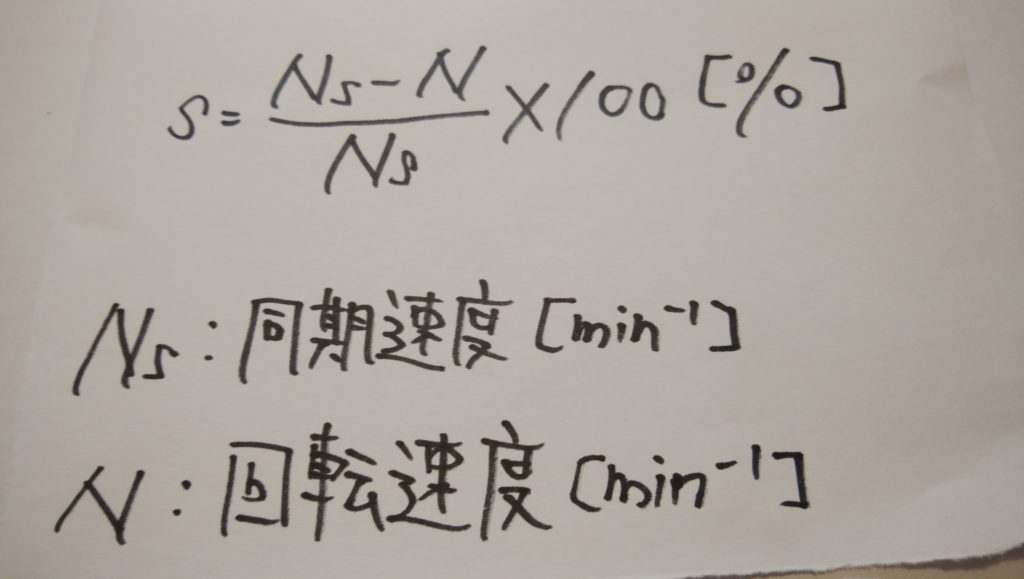
回転子の回転速度が回転磁界より速くなることはありません。この速度差と同期速度との比率sを「滑り」といいます。
滑りsは次の式で表されます。
誘導電動機の等価回路
誘導電動機と変圧器
誘導電動機の固定子巻線(一次巻線)に電圧を加えると回転子コイル(二次巻線)に起電力が生じます。この仕組みは変圧器と似ています。
誘導電動機の回路図も次のように変圧器の回路とよく似ています。
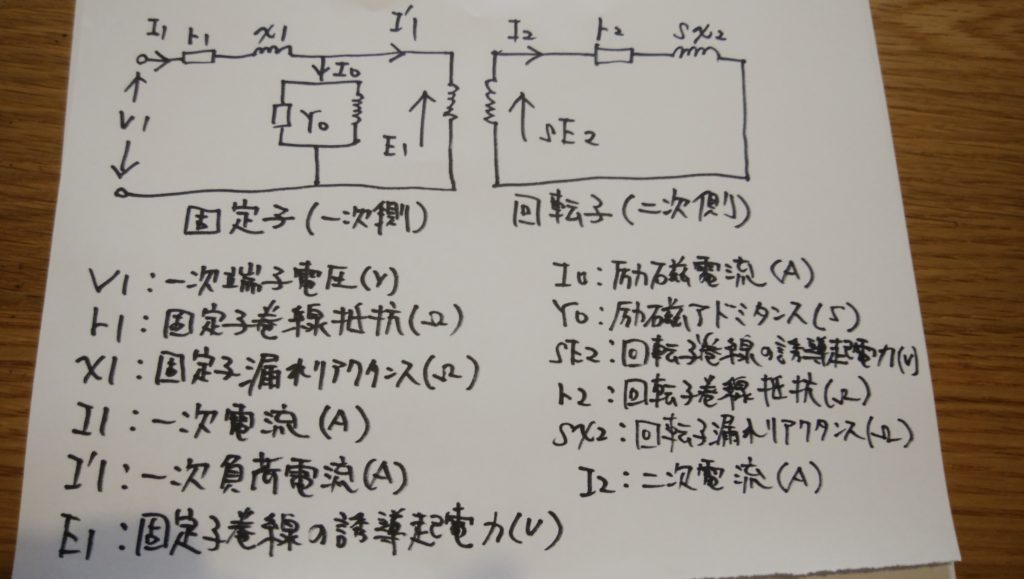
誘導電動機が変圧器と異なるのは二次側(回転子)の誘導起電力と漏れリアクタンスが滑りに比例して変化する点です。
回転子が停止しているときの誘導起電力と漏れリアクタンスをE2,x2とすれば、回転子が滑りsで回転しているときには、それぞれ次のようになります。
また、二次側起電力や電流の周波数(二次周波数)も滑りに比例して変化します。固定子の周波数(一次周波数)をf1(Hz)とすれば回転子が滑りsで回転しているときの回転子の周波数(二次周波数)f2は次のように表されます。
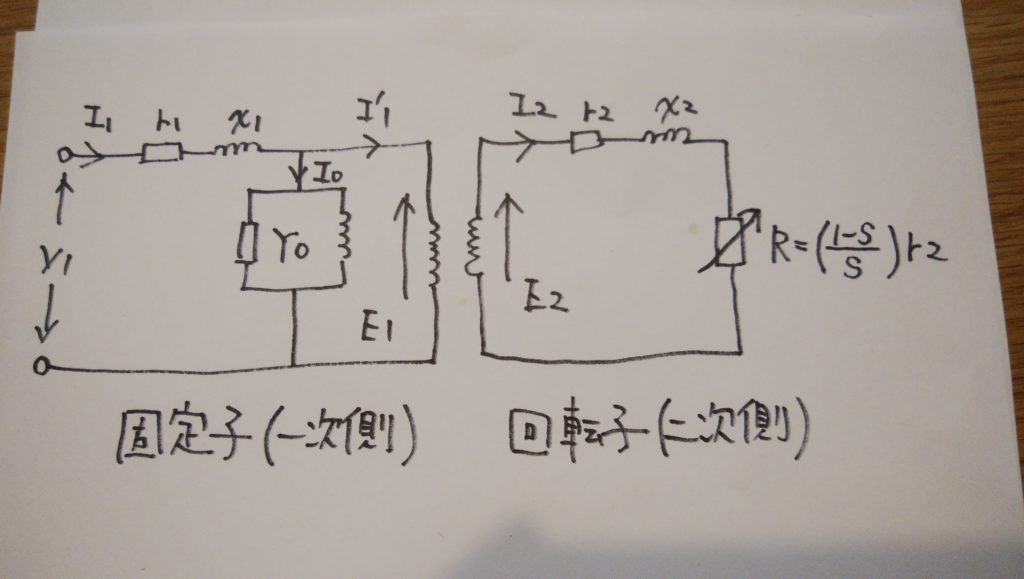
誘導電動機の等価回路
回転子のインピーダンスZ2は巻線抵抗r2と漏れリアクタンスsx2の合成ですから、次のように求められます。
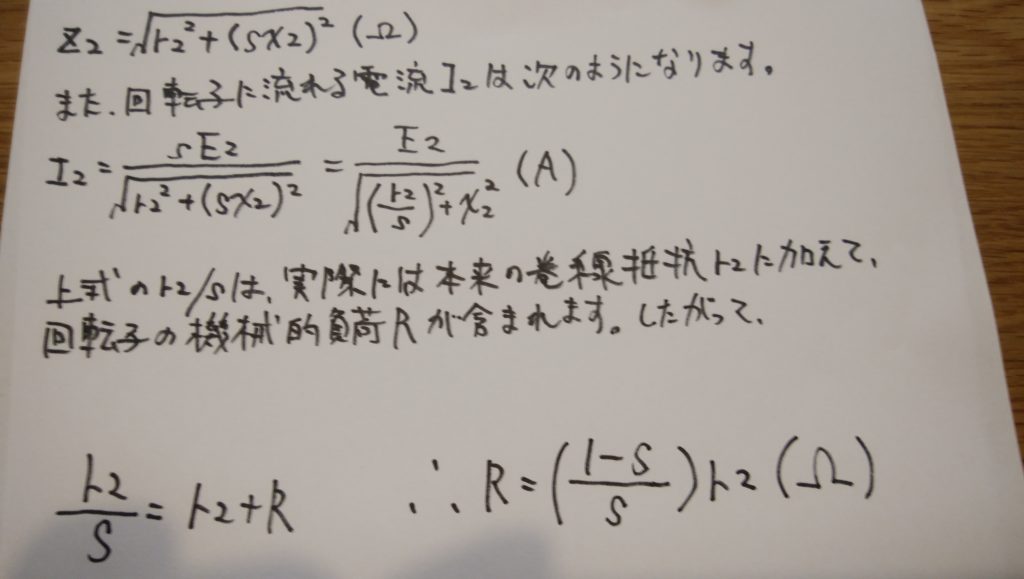
以上より誘導電動機の回路図は次のように書き換えられます。
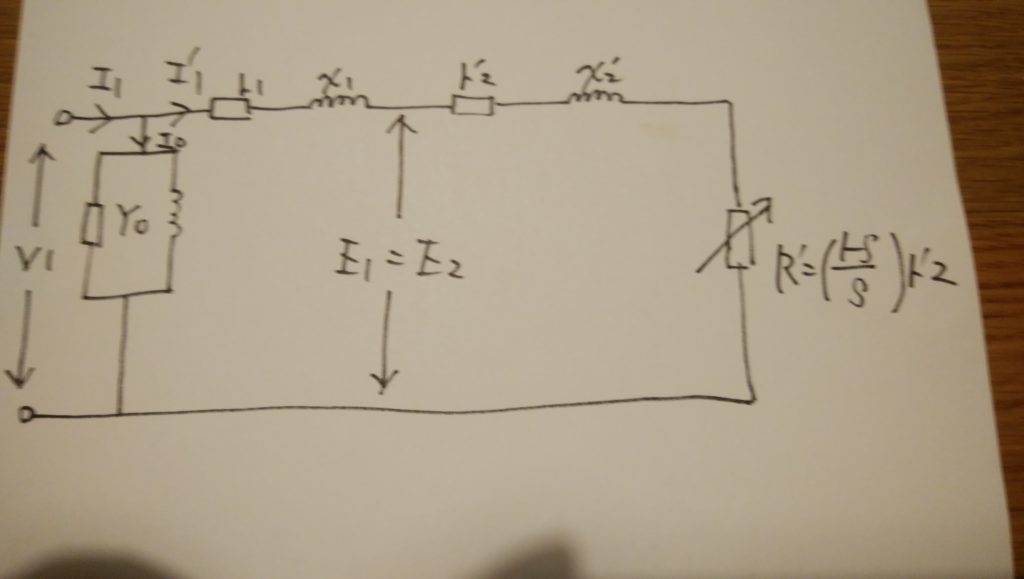
上の回路図の二次側を一次側に換算すれば次のような「誘導電動機の等価回路」を作れます。
誘導電動機の出力とトルク
誘導電動機の入力と出力
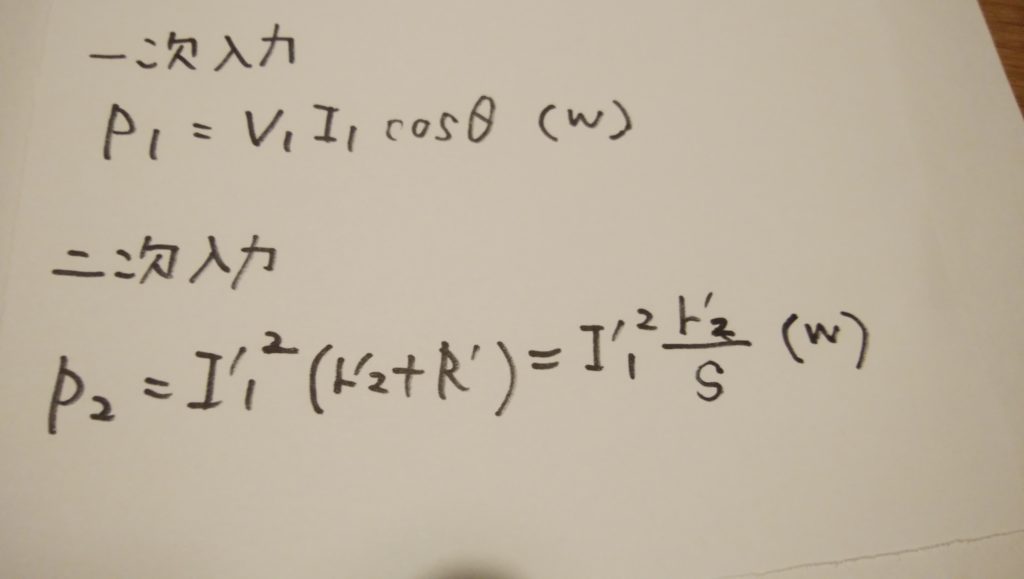
前節で説明した簡易等価回路から三相誘導電動機の一相当たりの一次入力と二次入力は、それぞれ次のように求められます。
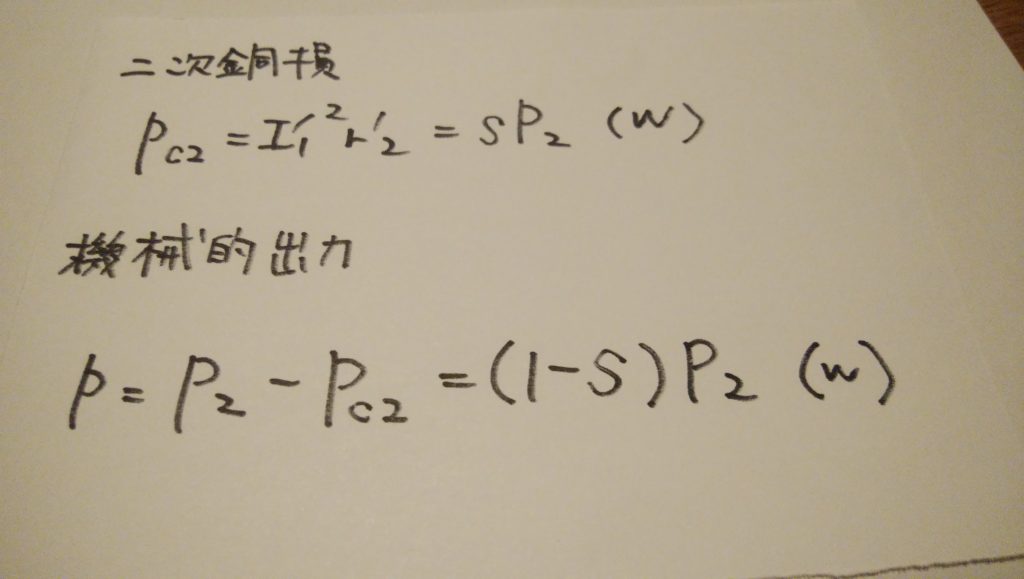
二次入力のうち、一部は「二次銅損」として失われ残りが回転子を回転させるための「機械的出力」(発生動力)になります。
これらはそれぞれ次のように求められます。
トルクと同期ワット
回転子の機械的出力Pは角速度ω(rad/s)とトルクT(N・m)の積で表すことができます。
P=ωT(W)
上式より、トルクTは次のように表されます。
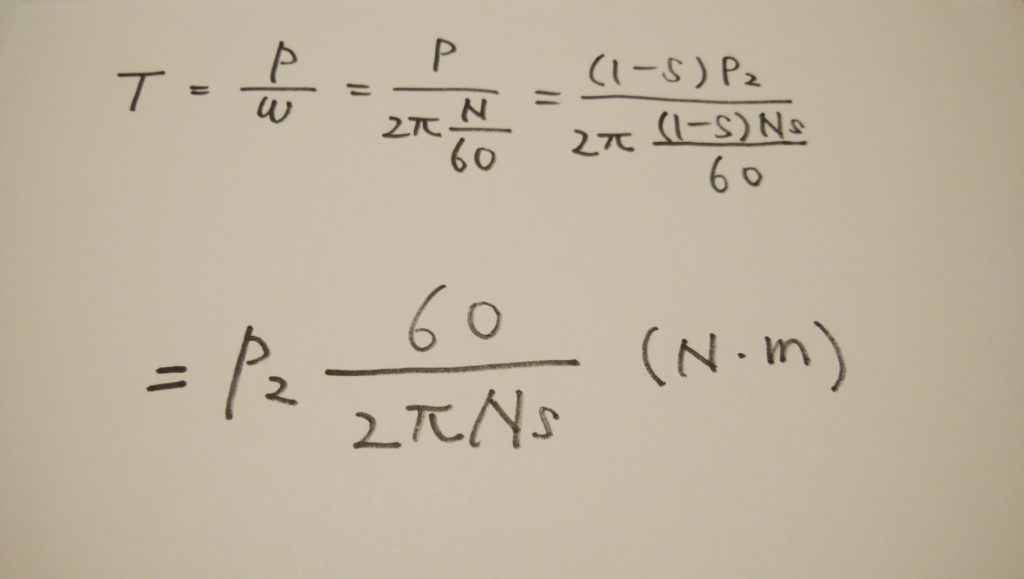
このように、トルクT((N・m)は二次入力P2(W)と同期速度Ns(min^-1)から求めることもできます。
同期速度を一定とすればトルクは二次入力に比例するため二次入力の値だけでトルクの大きさを示すことができます。
この場合の二次入力を「同期ワット」といます。
誘導電動機の効率
誘導電動機の効率ηは一次入力と機械的出力との比であり、次の式で表されます。
上式より誘導電動機の機械的出力(W)は一次入力(W)×効率で求めることもできます。
誘導電動機の運転
誘導電動機の種類
三相誘導電動機は回転子の構造によって「かご型」と「巻線形」に分かれます。
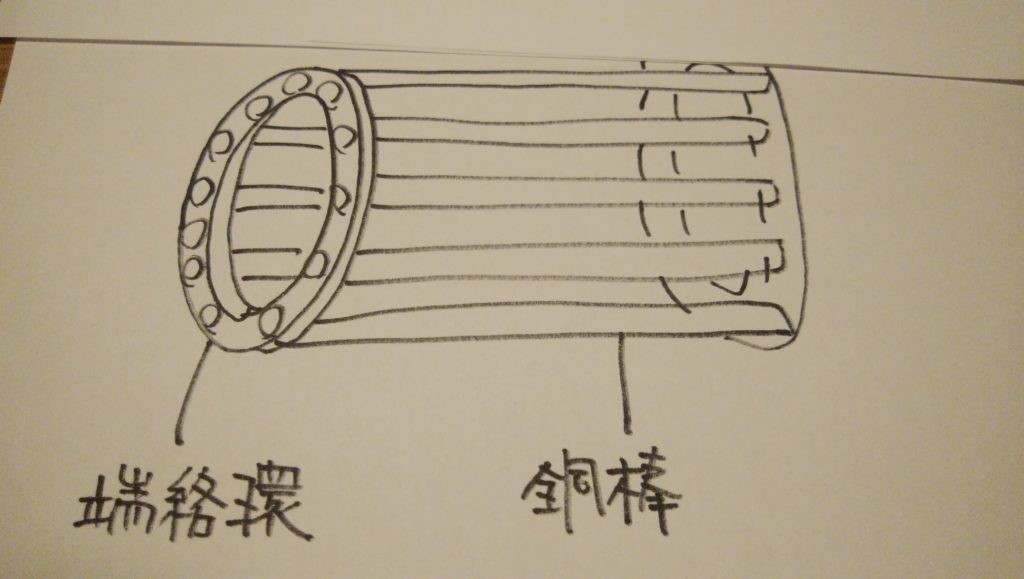
かご形
回転子鉄心のスロットに巻線の役割を果たす銅棒を差し込み、両端を銅製のリング〈端絡環)で結んだもの。
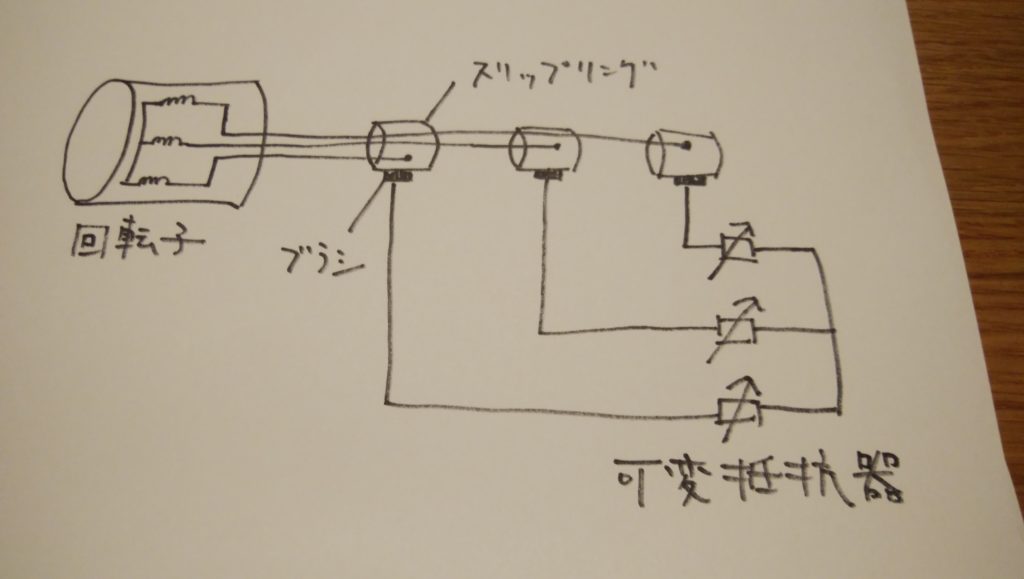
巻線形
固定子と同じく3組の巻線を回転子鉄心のスロットに収め、三相結線にしたもの。スリップリングとブラシを介して外部の可変抵抗器と接続されています。
誘導電動機を始動するには
誘導電動機を停止状態から始動させるには固定子巻線に電圧を加えます。このときの一次電流を「始動電流」といいます。
誘導電動機の始動時の滑りはs=1になります。したがって始動電流Isの大きさは等価回路により次のように求められます。(励磁電流Ioは無視する)
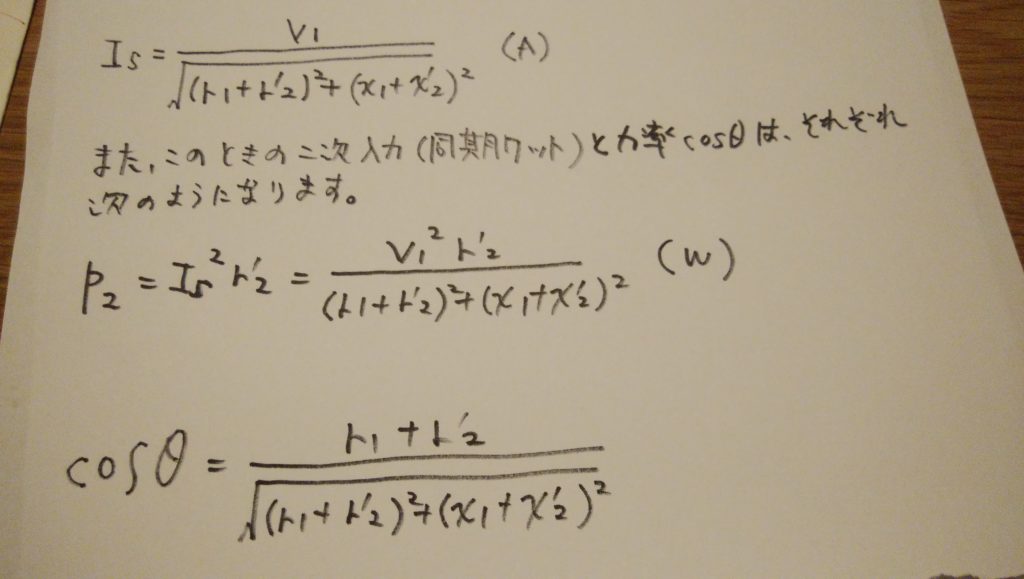
巻選抵抗r1,r’2は始動時のx1,x’2に比べて小さいので誘導電動機の始動時の力率は低く、二次入力も始動電流の割に小さくなります。
したがって始動トルクも大きくなりません。
そこで始動電流を小さく、また始動電流を大きくするために次のような始動方法が工夫されています。
巻線形誘導電動機の始動方法
誘導電動機のトルクを同期ワットで表すと、
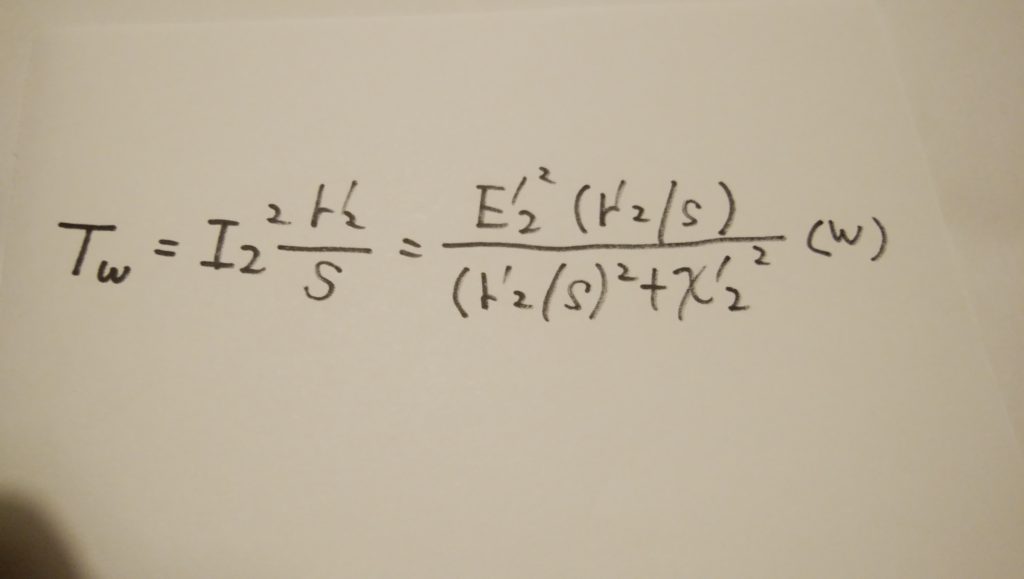
上式より滑りsがm倍になったときに同じトルクを得るには二次抵抗r2もm倍すればいいことがわかります。(これをトルクの「比例推移」といいます)
巻線形誘導電動機では回転子の外部に取り付けた可変抵抗器によって二次抵抗の値を調整できます。始動時(s=1)に二次抵抗を大きくすることで、始動電流を小さく、始動トルクを大きくします。
その後回転速度が上がったらスリップリングを短絡します。
かご形誘導電動機
かご形誘導電動機では始動電流を小さくするために以下のような始動方法が用いられます。
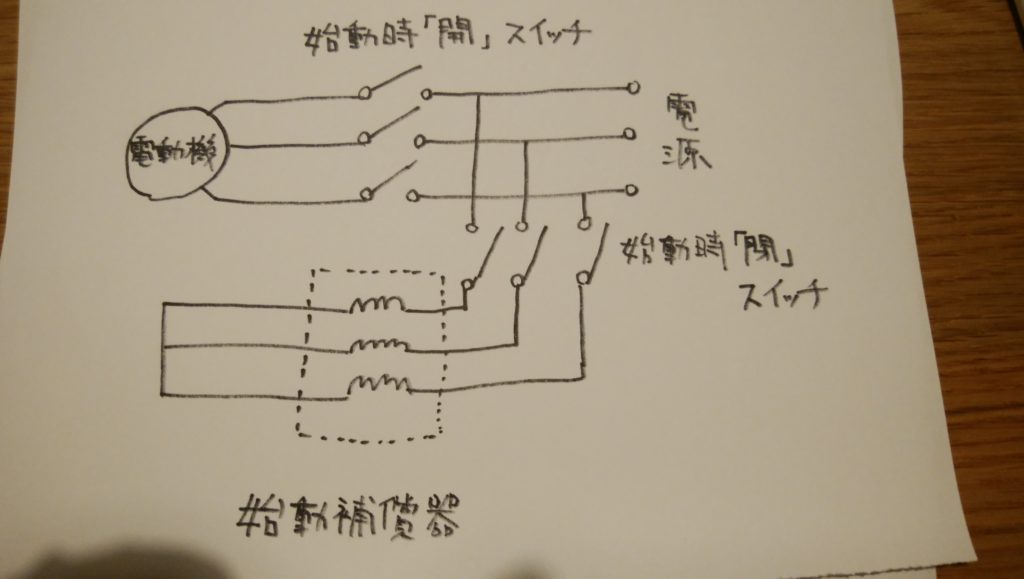
補償器始動
三相の単巻変圧器で構成する「始動補償器」を使い始動時に加える電圧を定格電圧の50~80%に抑えます。
回転速度が全速度に達したら定格電圧に切り替えて運転します。
補償器を用いた場合の始動電流は電圧に比例して減少し、始動トルクは電圧の2乗に比例して減少します。
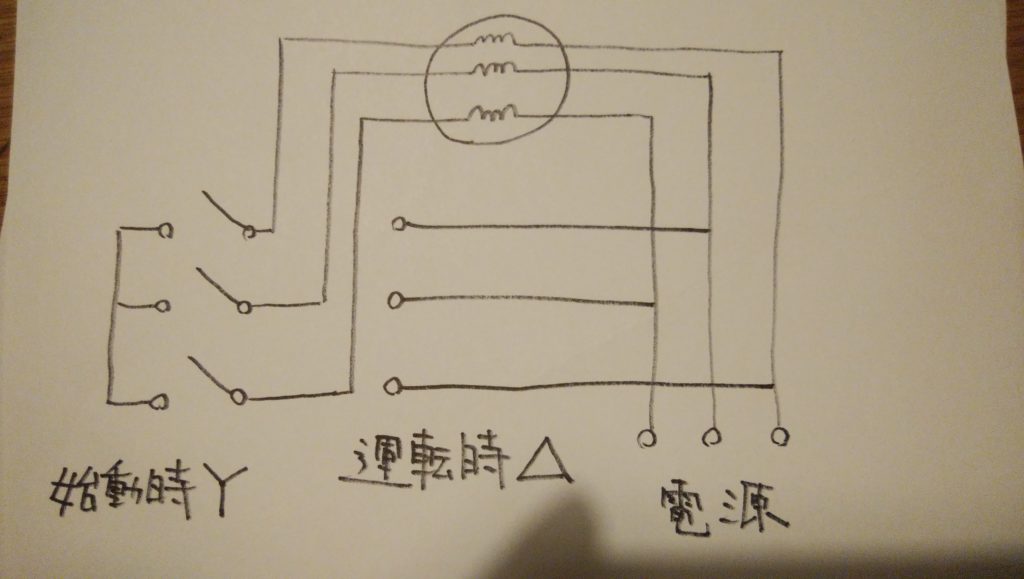
Y-Δ始動
始動時の固定子巻線をY結線にし、三相の電圧を定格の1/√3に抑えます。回転速度が全速度に達したらΔ結線に切り替えます。始動電流と始動トルクはともに全電圧始動時の1/3になります。
誘導電動機の速度制御
誘導電動機の回転速度Nは次の式で表されます。
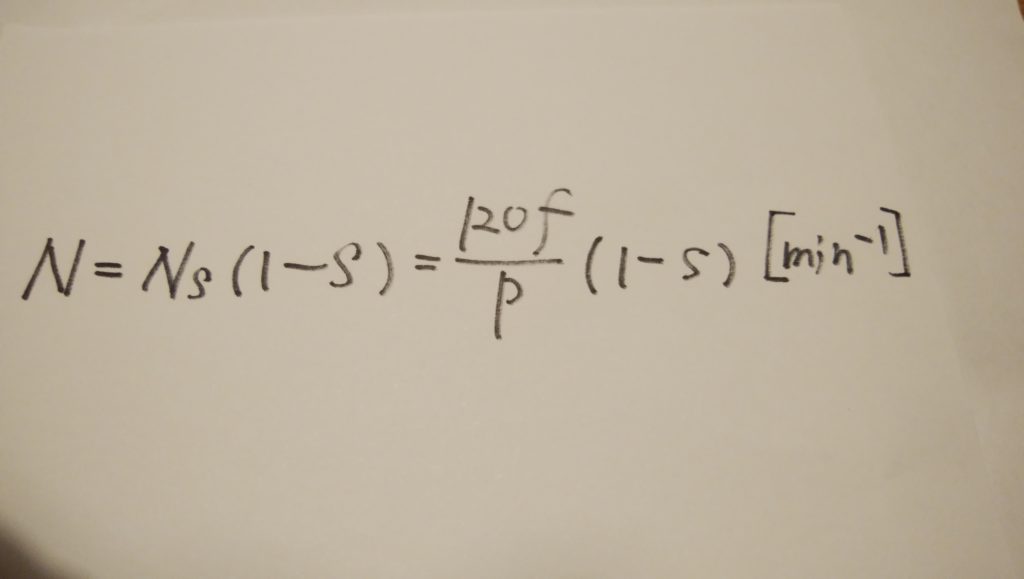
上式より、固定速度を変化させるには電源の周波数f(Hz)、固定子の磁極数p、滑りsのいずれかを変化させればよいことがわかります。
かご形電動機では主として極数や周波数変化による速度制御が用いられ、巻線形電動機では滑り変化による速度制御が用いられます。
極数変化:固定子巻線の接続を切り替えて極数を変化させます。⇒かご形
周波数変化:インバータ方式により電源周波数を変化させます。⇒かご形
滑り変化:二次抵抗を増減する方法(二次抵抗法)と二次回路に可変電圧を加える方法(二次励磁法)があります。⇒巻線形
単相誘導電動機
「単相誘導電動機」は固定子巻線に加える電圧に単相の交流電源用いる誘導電動機です。
単相誘導電動機のしくみ
単相誘導電動機の固定子巻線によって発生する磁界は図のように方向が交互に変わる「交番磁界」になります。
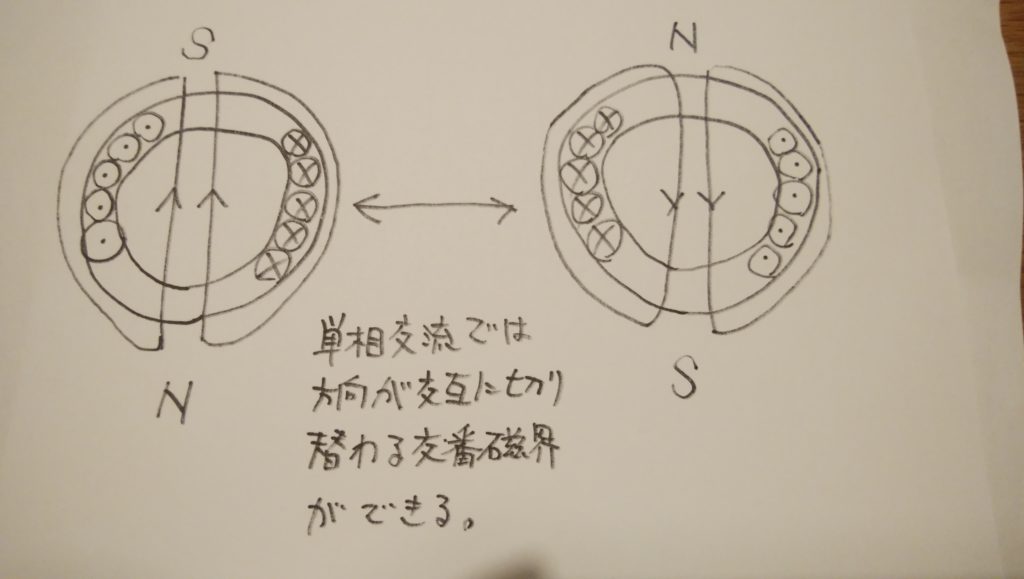
回転子はこのままでは回転できません。しかし回転子を左右どちらかに少しでも回転させればその方向にトルクが生じて回転を続けられるようになります。
そのため単相誘導電動機は何らかの方法で始動時に回転子を回転させています。
単相誘導電動機の始動方法
単相誘導電動機は始動方法によって以下のような種類に分類されます。
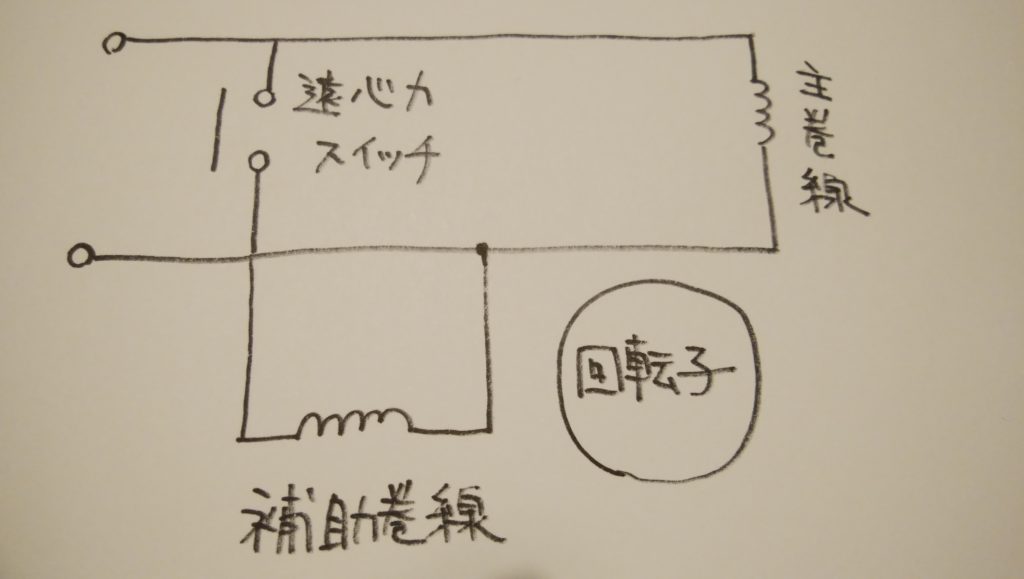
分相始動形
固定子巻線に、主巻線のほかに抵抗の大きい「補助巻線」(始動巻線)を設け、楕円型の回転磁界をつくる方法。
始動時後は主巻線のみで運転します。
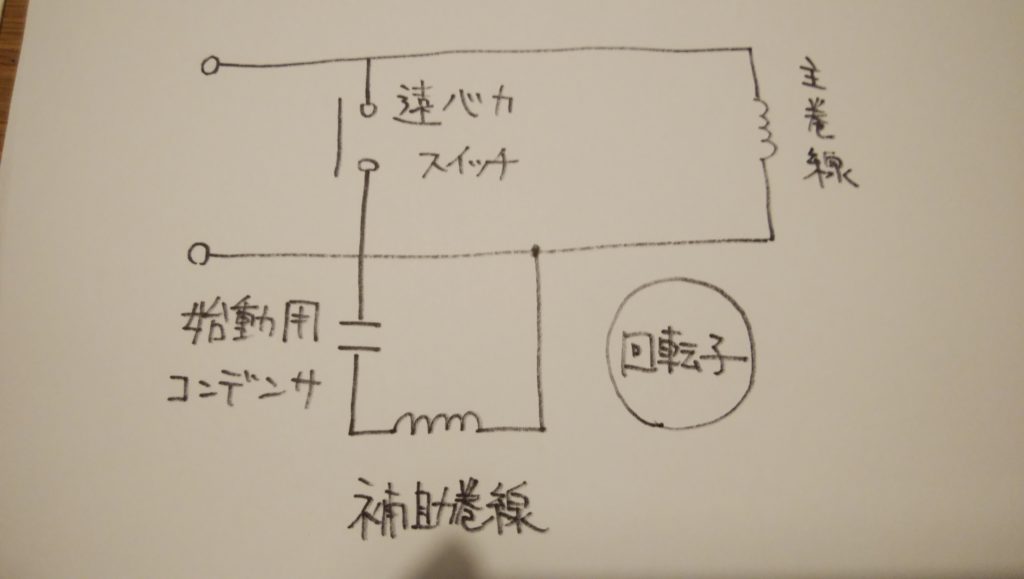
コンデンサ始動形
補助巻線の回路にコンデンサを直列に接続し、主巻線より位相の進んだ電流を流す方法。分相始動形より始動トルクが大きくなります。
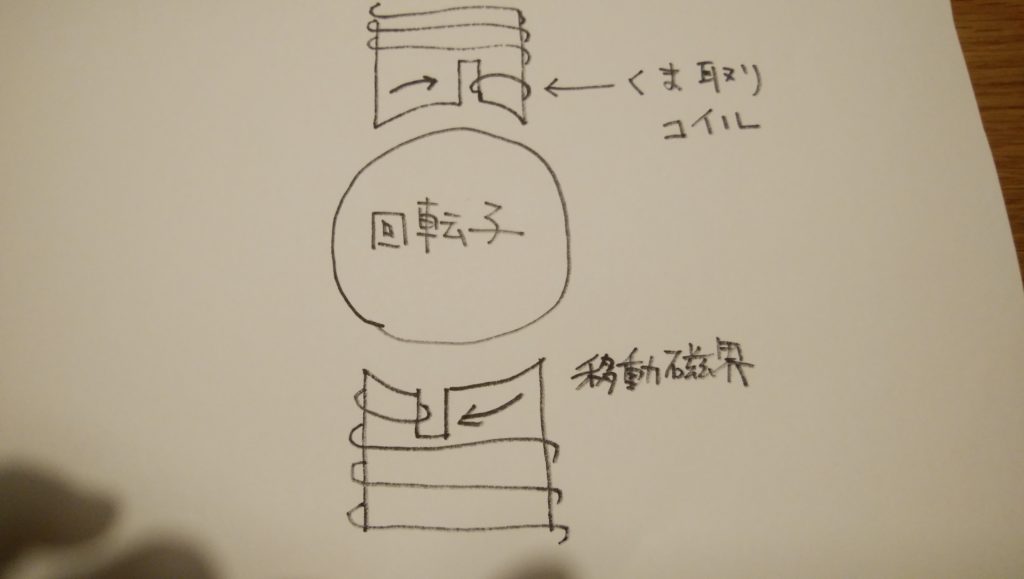
くま取りコイル形
固定子の一部に主巻線のほかに「くま取りコイル」を設け、くま取りコイルのない部分からある部分へ移動する磁界を発生させる方法。
コンデンサモータ(コンデンサ誘導電動機)
コンデンサを接続した補助巻線回路を運転中にも切り離さずに用いる誘導電動機。コンデンサ始動形に比べ運転時の効率がよくなります。

