前回、micropythonでPCA9685を制御しロボットのモーションを作成しました。↓

今回は、第3回で作成したWIFI AP,WEBサーバーのプログラムに前回のプログラムを追加し、ブラウザからロボットのモーションを操作できるようにしてみます。
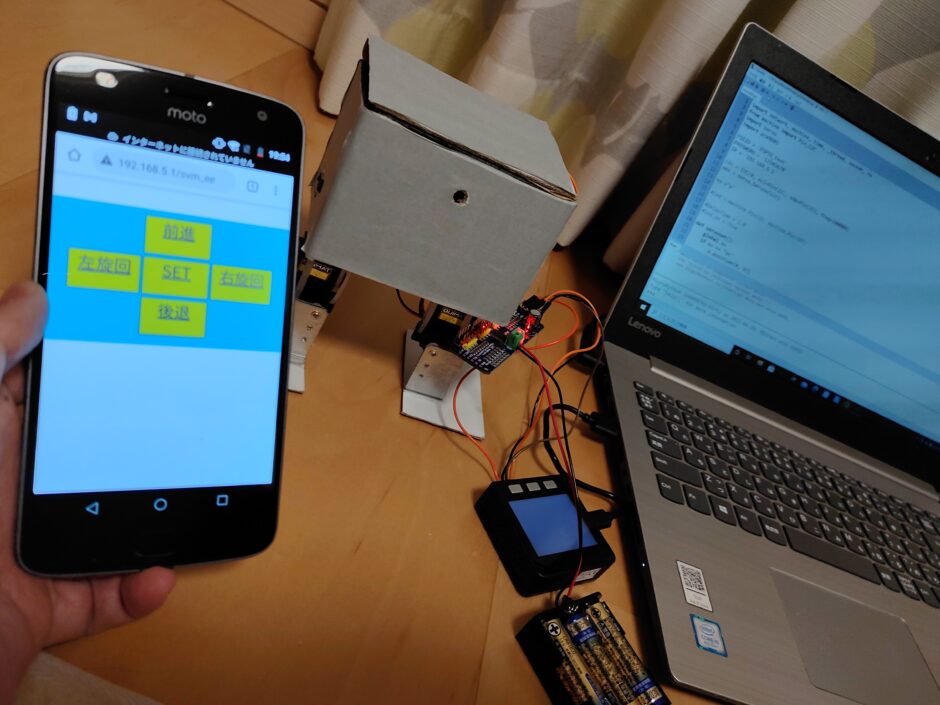
前回同様、サムネイルの写真の通りハードウェアを繋いでおきます。
server.py
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 |
import network import machine import time import socket import re from machine import Pin,I2C import servo import pca9685 ESSID = 'M5stack' PASSWORD = '11223344' IP = '192.168.5.1' i2c = I2C(0, scl=Pin(22), sda=Pin(21)) sev = servo.Servos(i2c) sv ="p" #サーボモーター制御 def servoset(): global sv if sv == "st": sev.position(0, 97) time.sleep_ms(1000) sev.position(1, 90) time.sleep_ms(1000) sev.position(2, 100) time.sleep_ms(1000) sev.position(3, 90) time.sleep_ms(1000) elif sv == "fw": sev.position(3, 70) sev.position(1, 70) time.sleep_ms(500) sev.position(0, 77) sev.position(2, 80) time.sleep_ms(500) sev.position(3, 90) sev.position(1, 90) time.sleep_ms(500) sev.position(3, 110) sev.position(1, 110) time.sleep_ms(500) sev.position(0,117) sev.position(2, 120) time.sleep_ms(500) sev.position(3, 90) sev.position(1, 90) time.sleep_ms(500) elif sv == "lt": sev.position(3, 40) sev.position(1, 60) time.sleep_ms(500) sev.position(0, 117) time.sleep_ms(500) sev.position(3, 90) time.sleep_ms(500) sev.position(1, 90) time.sleep_ms(500) sev.position(0, 97) time.sleep_ms(500) elif sv == "bk": sev.position(3, 110) sev.position(1, 110) time.sleep_ms(500) sev.position(0, 77) sev.position(2, 80) time.sleep_ms(500) sev.position(3, 90) sev.position(1, 90) time.sleep_ms(500) sev.position(3, 70) sev.position(1, 70) time.sleep_ms(500) sev.position(0,117) sev.position(2, 120) time.sleep_ms(500) sev.position(3, 90) sev.position(1, 90) time.sleep_ms(500) elif sv == "rt": sev.position(3, 120) sev.position(1, 140) time.sleep_ms(500) sev.position(2, 80) time.sleep_ms(500) sev.position(1, 90) time.sleep_ms(500) sev.position(3, 90) time.sleep_ms(500) sev.position(2, 100) time.sleep_ms(500) #html def home_page(): html = """<html lang="ja"> <head> <meta charset="utf-8"> <title>サーボテスト</title> <meta name="viewport" content="width=device-width, initial-scale=1"> <style> * { margin: 0px; padding: 0px; } body { max-width: 600px; font-size: 25px; width: 100%; } main { height: 40vh; background: skyblue; } ul { display: block; height: 40vh; list-style: none; padding-top: 10px; } .bc { display: flex; } .a, .bc, .d { height: 12vh; } li { width: 100px ; height: 90% ; margin-left: auto; margin-right: auto; background: yellow; } .b { margin-left: auto; } .c { margin-right: auto; } ul li { text-align: center; } .a li, .b li, .c li, .d li { border: solid 1px; } .n li { background: yellow; } a:active { color: #ff2020; } .a li, .b li, .c li, .d li, .n li { border: solid 1px; } .n { margin-right: 3px; margin-left: 3px; } </style> </head> <body> <main> <ul> <div class="a"> <a href="/svm_aa"> <li id="forward">前進</li> </a></div> <div class="bc"> <div class="b"> <a href="/svm_bb"> <li id="left">左旋回</li> </a></div> <div class="n"> <a href="/svm_ee"> <li id="set">SET</li> </a></div> <div class="c"> <a href="/svm_cc"> <li id="right">右旋回</li> </a></div> </div> <div class="d"> <a href="/svm_dd"> <li id="backward">後退</li> </a></div> </ul> </main> </body> </html>""" return html #テキストとして値を返す #WIFI APの立ち上げ ap = network.WLAN(network.AP_IF) ap.config(essid=ESSID, authmode=3, password=PASSWORD) ap.ifconfig((IP,'255.255.255.0',IP,'8.8.8.8')) ap.active(True) print("AP OK") #WEBサーバーの立ち上げ s = socket.socket(socket.AF_INET, socket.SOCK_STREAM) s.bind(('', 80)) s.listen(5) #クライアント接続 while True: conn, addr = s.accept() request = str(conn.recv(1024)) m = re.search(r'svm_(\D\D\s)', request) #print(request) #ボタン操作反映 if m != None : svm = m.group(0) if svm == 'svm_aa ': sv = "fw" elif svm == 'svm_bb ': sv = "lt" elif svm == 'svm_cc ': sv = "rt" elif svm == 'svm_dd ': sv = "bk" elif svm == 'svm_ee ': sv = "st" servoset() #サーボ関数呼び出し sv ="p" response = home_page() #html text格納 conn.send(response) #クライアントへhtmlデータ送信 conn.close() #scket破棄 print("Data Received") |
importのモジュールと、サーボモーターの関数を追加しただけです。
それでは、このプログラムをPC上から実行してみます。
動作確認
M5stacのWIFI APに接続後、サーバーにアクセスします。
操作画面のhtmlが表示されるので、全てのボタンが正常に動作するか確認します。
問題なければ下のようになります。↓
次回は、M5stackの画面に表情をつけるプログラムを追加したいと思います。

