3Dプリンターを購入して印刷は出来るようになたものの、自分でスケッチを描いた事がなかったので、2足歩行ロボットのスケッチに挑戦してみました。スケッチのソフトはFusion360を使用しました。
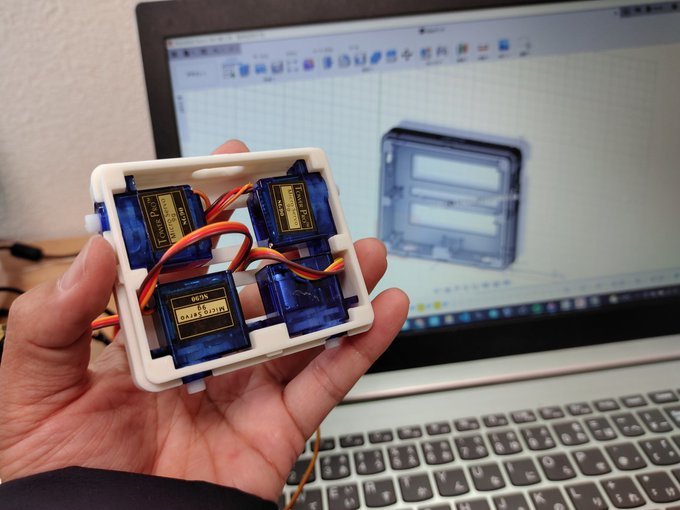
過去に、他者の作成したデータ(フリー素材)で印刷したロボットがあったので、それを参考に一応オリジナルなものを作成する事が出来ました。
参考にしたのはこれです。↓

今回は初心者ながら、なんとかデザインから印刷までやれましたので、ここでFusion360でのスケッチの書き方について軽くまとめておこうかと思います。
。。まあ所詮ド素人なのでほとんど役に立たないと思いますが(-_-;)とりあえず書いときます!
目次
Fusion360 無料版
10個までのドキュメントを作成できる
CADデータは基本パーツ毎に分けて管理すると思われますが、Fusion360の無料版の場合、これが10個までしか管理できません。これがドキュメントと呼ばれているみたいですが、WAN側にあるFusion360のサーバーに自動で保存されるようです。
ですが、ローカルにデータをエクスポートできるので、クラウドで管理出来る容量を超えた場合は、PCで保存しておくやり方も出来そうです。
印刷する際はCADデータをSTLデータに変換する必要がありますが、これはFusion360で簡単に変換可能です。
一部機能が使えないが素人には十分
STLからCADデータの変換が出来れば、例えば拾ってきたSTLデータにアレンジを加える事ができそうですが、Fusion360無料版ではそれを実行するために必要な機能にロックがかかっているようです。
そのほかにも、細かいことを言えば一部機能が使えないっぽいですが、素人からすればなくても十分すぎる位の機能が使えますので、無料版でも全然満足できるかと思います。(商用利用はもちろん不可)
3Dデータ作成から印刷の大まかな流れ
モックを用意する
あらかじめ作りたいものの見本となるような図面を作成しておきます。超アナログですが、私は冒頭のロボットを参考に定規で長さなどを決めて、手書きで各パーツの設計を紙に書き起こしました。
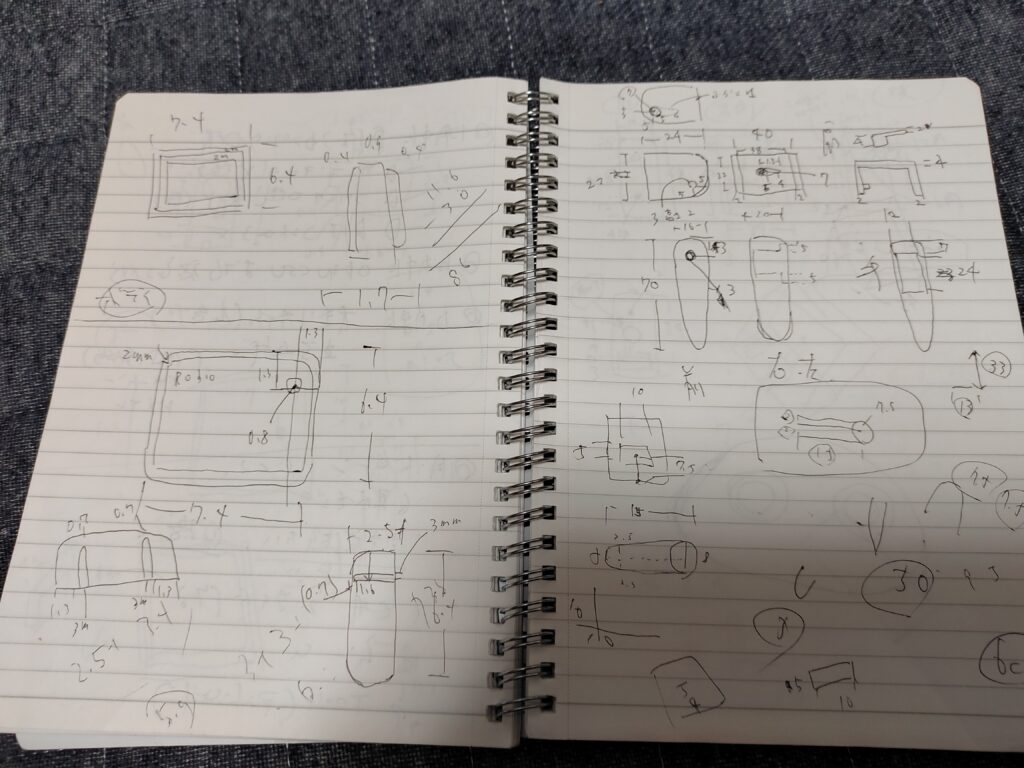
以後これを見ながら3Dデータの作成に入るので、かなり重要な部分だと思います。1mm単位での正確さが必要でした。身をもって体験しました。。(サーボモーターがギリギリ入らない、ビス穴が微妙にずれているなどなど)
3DCADソフトで3Dデータの作成
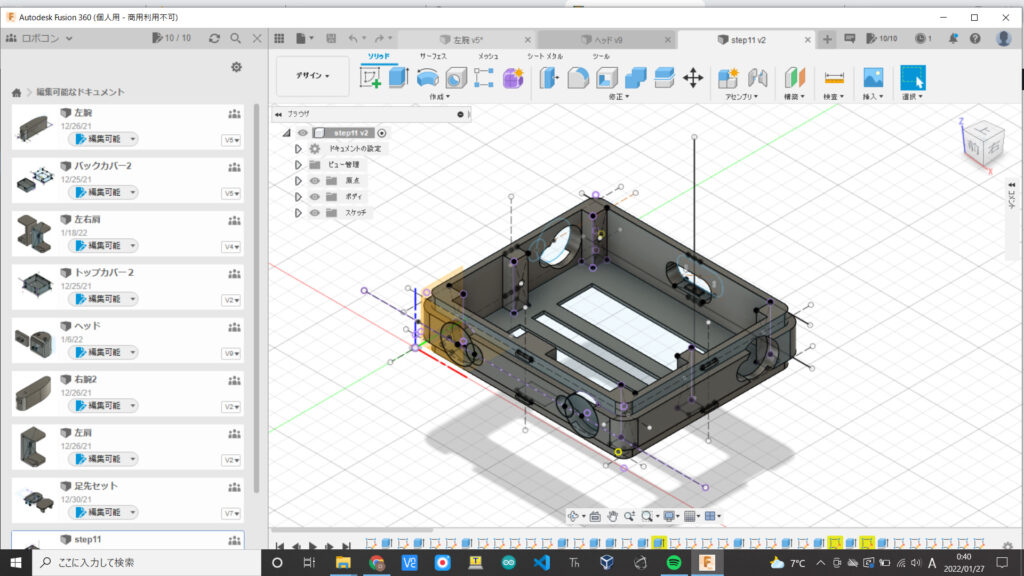
モックの通りに、CADソフトでスケッチを描いていきます。基本的には下記の手順で各パーツを作成していきます。
1.x,y軸で四角形の面を作る(線分)
2.1の面をz軸に押し出して立体を作る(押し出し)
3.立体を整形する(フィレット、線分を引いたあとの切り取りなど)
めちゃシンプルにまとめればですが、この3工程のような気がします。
私は初めに参考書やyoutubeを見ましたが、もちろん為になることはありましたが、結局は自己流といいますか、実際に手を動かして雰囲気を掴むことで一気に理解が深まった気がします。
ですので、書籍やyoutube等でインプットに時間をかけるよりは、ある程度の早い段階で実際にCADデータ作成に入った方がいいかと思います。
STLデータに変換し印刷
CADデータが完成したらSTLデータに変換し、3Dプリンタで印刷します。印刷している間に次の3Dデータを作成していけば、時間を有効に使えるかと思います。
3Dデータ作成時につまづいた点
整形したい面が選択できない
ある程度3Dデータが完成してくると、整形したい面が選択できない場面に出くわす事が多々あります。これはどうやらこれまでにスケッチしてきた部分が邪魔している場合が多いので、画面左に表示されているスケッチの表示/非表示を利用する事でクリアする場合があります。
また、引いた線分が意図した高さに無い場合も影響するので、線分を引く際は高さも注意が必要です。
それでもやっぱり面が選択できない。。
気合と根性で乗り切りました。(-_-;)。。。
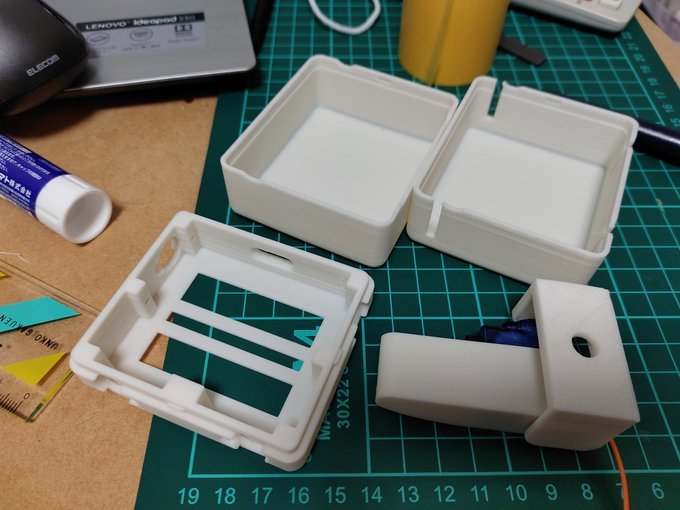
完成
こんな感じになりました。↓
次回は、このロボットを組み立てて、プログラムを入れて動かしてみたいと思います。

