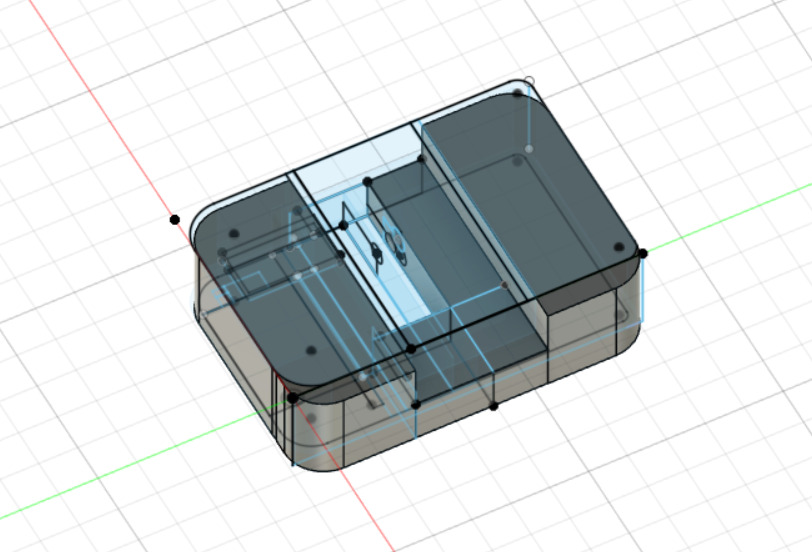
前回、ボディ部を作成しました。↓

今回は足の作成に入りたいと思います。
足は、本体の回転を伝える「支え」の部分と、本体を傾けさせる「足」の部分に分けてパーツを印刷します。
ここ、結構躓きまして(足だけに。。)、かなりの試行錯誤を繰り返しました(-_-;)
その辺の詳細はまた後日まとめるとして、今回は足のパーツ印刷、そして本体組立てまでをまとめたいと思います。
足のCADスケッチ
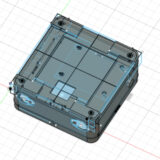
支え部分
本体と足のパーツを接続させる支えの部品になります。
上側に本体のサーボを繋いで、下側に足のサーボを繋ぐように設計しています。
これで足に本体の水平の回転が伝わり、足の垂直方向の傾きが本体に伝わります。
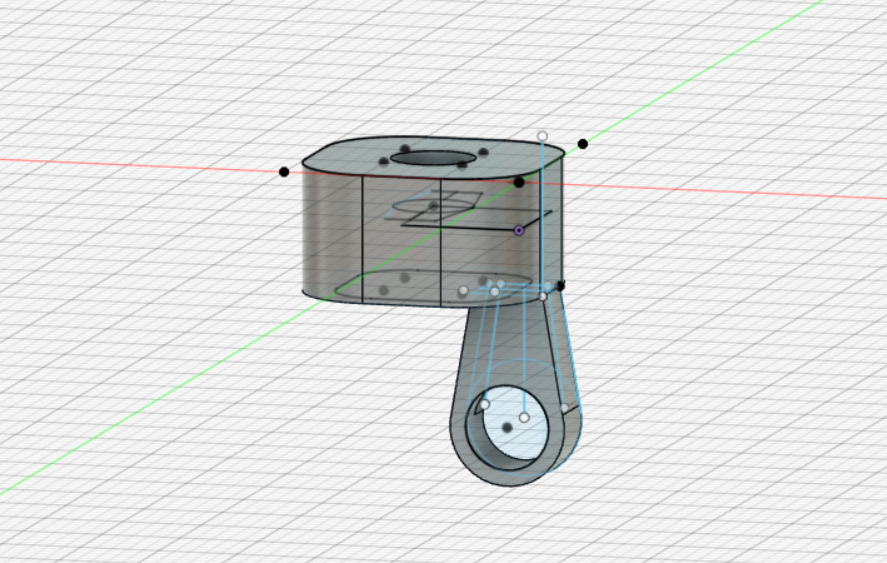
続いて足。
足部分
ここにサーボモーターをはめ込んで、支えの部分と繋ぎます。
足が傾いた際に支えが引っかからないよう、大き目のスリットを入れています。
3Dプリント
印刷と組立て
我ながらすごく良い感じです。
ところが、この後の動作テストで「足が全く動かない」トラブルに見舞われます。。
前途したスケッチでは改善済みのものを掲載していますが、上のツイートの物は改善前の物で、ある重大な欠陥が潜んででおります。。
そこは次回、動作テストについてまとめる時に、合わせて報告しようかと思います。