前回、M5stackの液晶表示のプログラムを作成し、WEBサーバー、サーボモーター駆動などのメインプログラムに組み込みました。↓

これで1つのプログラムファイルに、今回作成する2足歩行ロボットのプログラムをまとめる事が出来ましたので、これをM5stackのフラッシュROMにmain.pyとして保存します。
最後に、頭の段ボール内部にハードウェア一式を格納して完了です。
それでは、まずプログラムをM5stackに書き込みます。
M5stackのフラッシュにmicropythonプログラムを書き込む
方法はいくつかありますが、2つ書いておきます。
1つは、ターミナルからコマンド打って、プログラムファイルをm5stackに移す方法。
2つ目は、Thonny IDEでプログラムファイルをm5stackに移す方法。
ファイルをm5stackに移動させた後、ファイル名を「main.py」とします。
これでm5stackが起動後、自動で初めにmain.pyのプログラムを読み込みに行ってくれます。
※今回のプログラムではi2cのライブラリを使用しているので、i2cのデバイスが接続されていなければ正常にプログラムが立ち上がりません。
ハードウェアを収納
頭部の段ボール内に、ハードウェア一式を収納します。
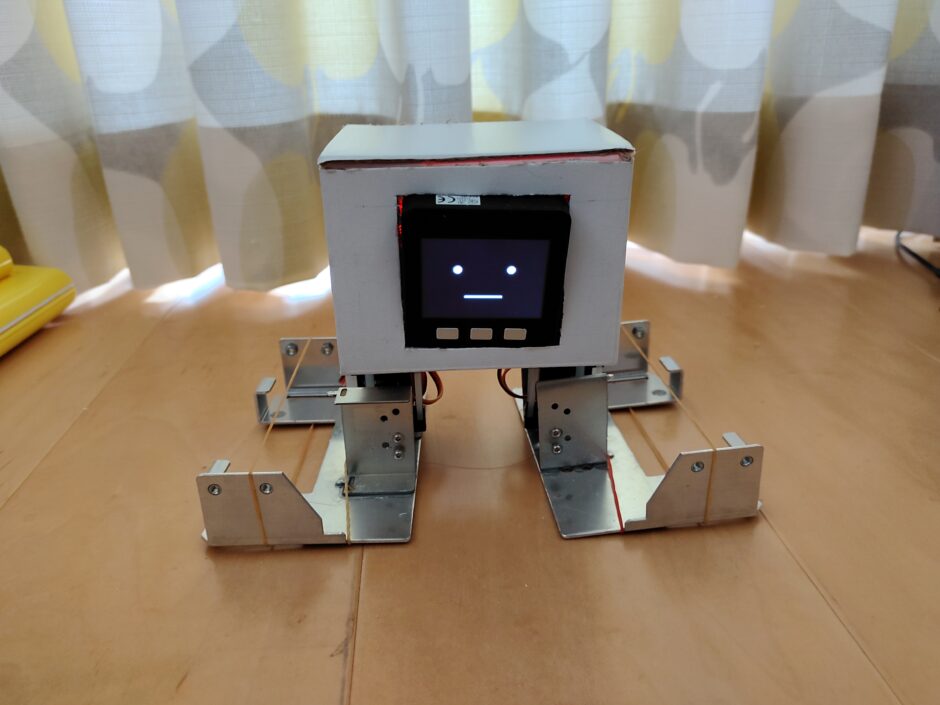
サムネイルの写真にあるとおり、M5stackの表示画面を見えるように前面をくりぬきました。
なお、足回りが金属性になってますが、気にしないでください。。
完成!
それでは、m5stackの電源を投入し、顔の表示を確認します。
続いてWIFI APに接続し、WEBサーバーにアクセスします。
html画面でボタンをクリックし、ロボットが動けばOKです!こんな感じになります。↓※足に合わせてモーションのプログラムを変更してますので、今回作成したプログラムとは異なる動きになっています。この辺は好きなように変更してください。
7回にわたりm5stackでの2足歩行ロボをまとめてきましたが、素人なりにはまあまあ満足しています。pythonを使い、ブラウザからサーボを制御するという当初の目的が達成されましたので。
これで一応完了としますが、腕や音楽の再生機能なども追加したいと思っていますので、また機会があればまとめて記事にしたいと思います。
最後に、ここまで読んで下さった方々がいれば非常にありがたいです。ありがとうございます。(人”▽`)
少しでも参考になってくれれば、とても嬉しいです。

