少し前に、DCモーターで動くM5Stackの2足歩行ロボットを作りました。↓

これは揺動クランク機構といって、いわばゼンマイ仕掛けで歩くおもちゃの仕組みを取り入れたものになります。
自分でいうのもなんですが、スタックチャン界隈では目新しいというか、オリジナリティがあると言えばそうなのですが、2足歩行と呼ぶには少し物足りませんでした。前後にしか動けないし、動きも短絡的で迫力に欠ける感じで。
やっぱりサーボモーターを使って前後、旋回、動きもダイナミックにしてみたい、そういう気持ちはずっと持っていました。
ただ、サーボモーターを使うとなれば、M5Stackのあのサイズの中に納めなければならず、サーボドライバやバッテリ、配線等を加味すれば不可能だな、との結論に至っておりました。
ところが、この度、「ミニサイズのサーボモーター」「ミニサイズのサーボドライバ」を手に入れる事が出来ました。バッテリーはLipoでちょうどいいサイズのものを持っていましたので、これで役者は揃った訳です。
ということで、これから数回に分けて「M5Stackで作る2足歩行ロボット”スタックチャン”」の作成についてまとめていこうと思います。
備忘録的な感じで記録しますが、M5Stackでロボットを作ろうとしている方のお役に立てれば幸いです。
今回は構想編ということで、これから作るスタックチャンのおおまかな概要について、さくっとまとめておこうと思います。
2足歩行スタックチャン
ハードウェア構成
・M5Stack
・サーボモーター × 5
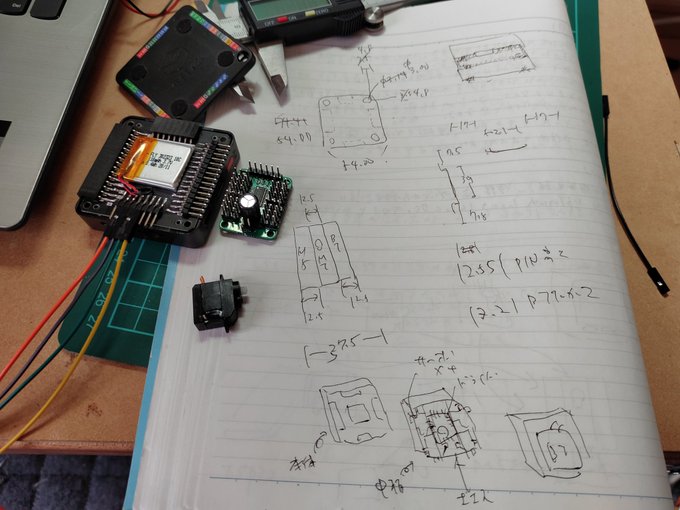
・miniサーボモータドライバ(※PONDAさん作)
・Lipo BT
M5Stack ⇒ i2c ⇒ サーボドライバ ⇒ サーボモーター の構成にします。
miniサーボドライバは、@PONDA_makeさんのお手製サーボドライバを使用しています。
こちら、PCA9685の半分のサイズにしてなんと接続ch数変わらず16chです。素晴らしいです、市販の製品には無かったので非常に助かりました。
ソフトウェア
開発言語はmicropythonを使います。
ロボットの操作については、別途コントローラー( 今回はM5Stack core2 )を用意し、遠隔で操作出来るようにします。
通信手段にはUDP通信を使います。
core2 ⇒ UDP ⇒ M5stack
フォルム
SDガンダム風
無難にサーボ4つで足回りを作ろうと思います。
足はスタックチャンらしくデフォルメしたロボットに見せたいので、SDガンダムみたいな足(靴だけ履いているみたいなやつ)に」したいと思います。
手もつけたかったのですが、すでに先人の方がやっておられたので、とりあえずサーボを1つ設置だけしておいて、後にあるものを追加して少しでもオリジナリティが出せるようにしておきます。
手乗りサイズ
スタックチャンですから当たり前ですが、極力奥行も小さくして、手乗りサイズにふさわしいものを作成したいと思います。
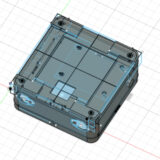
筐体
筐体は全て3DCADでスケッチ、3Dプリンタで印刷したものを使用します。(完全オリジナル)
まとめ
以上、さくっと2足歩行スタックチャンについて大まかな構成まとめました。
次回はとりあえず核となる「ボディ」の部分を3DCADでスケッチし、印刷、そして内部に部品を納めるところまで進めたいと思います。