少し前に、Raspberry Pi ZERO2 W を使った2足歩行ロボットを作りました。↓

これのハードウェアの構成としては、ラズパイの他に、サーボモーターにSG90、カメラ映像も乗っけたかったのでM5 CAMERA、サーボドライバにPCA9685、を使用しています。
したがって、ロボットの大きさも必然的にそれらに合わせる大きさ(収まる最低限の大きさ)になってしまうので、そこそこの大きさになっています。ottoより少し大きい位のサイズですかね。
今回はこのロボットに改良を加え、手乗りサイズまで小さくしてみようと思い立ちましたので、これから数回に分けて、完成までの道のりをまとめていこうかと思います。
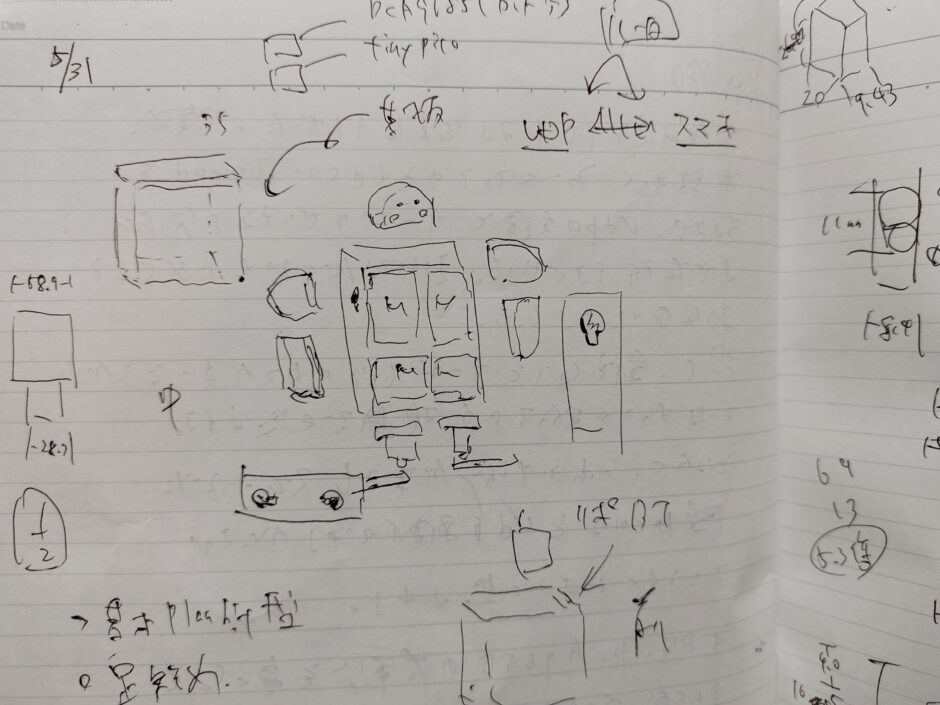
それではまず、今回はミニロボットの構想についてをまとめようかと思います。
目次
ハードウェアについて
全てを小さくする
バッテリーはlipoの1100mAhが十分小さいので、これを基準に考えたいと思います。
動体の部分にlipoがぎりぎり入るサイズにしたいので、マイコン、サーボドライバ、サーボモーターもlipo同等かそれ以下のサイズに変更してみます。
ネットで探していたところ、サーボモーター、及びマイコンに関してはいい感じの物を見つけたので、それを使う事にします。
サーボモーター
ご覧の通り、SG90の約半分の大きさになっております。
サーボモーターはこれを使う事にしました。
マイコンボード
マイコンは、ESP32ベースの「tiny pico」という基板があったので、これを使ってみる事にしました。
こちらもご覧の通り、ESP32の半分位の大きさになっています。素晴らしい。
サーボドライバ
こちらに関しては、PCA9685より小さい基板が見つからず。。
苦肉の策として「基板を半分カットしてみる」方法を取ろうかと思います。うまく行くかは分からず(-_-;)
ソフトウェアについて
micropython
tiny picoはESP32ベースで、micropythonがデフォルトでプリインストールされているみたいですので、とりあえずmicropythonで開発を進めたいと思います。
リモコン通信
コントローラーにはm5stack core2を使用し、タッチパネルでロボットを操作したいと思います。
通信にはUDPを使います。(本当はbleがいいけどmicropythonのbleの記述が上手くいかないので。。)
まとめ
使用する部材は
・tinypico
・ミニサーボ
・PCA9685(加工品)
・lipo BT
で、制御の概要としては
m5stack ⇒ UDP ⇒ tinypico ⇒ i2c ⇒ pca9685 ⇒ サーボモーター
のような感じにしたいと思います。
カメラに関しては、今回は小型化するのに邪魔なので、搭載はしない方向でいきます。
次回は、tinypicoのセットアップについてまとめようかと思います。

