前回、ミニロボットを作成するにあたり、おおまかな構想についてまとめました。↓

今回は核となるマイコンボードの「Tinypico」のセットアップ、動作確認についてまとめようと思います。
おそらく、今のところあんまり有名ではないといいますか、聞きなれてない名前のマイコンだと思いますんで、まずはTinyPicoってなんぞや?ってところから軽くまとめていきたいと思います。
目次
TinyPico
超ミニサイズのESP32ベースマイコンボード
とりあえず公式のURLを貼っておきます。
サイズは驚きの18×32です。分かりやすいように比較写真を乗っけておきます。↓

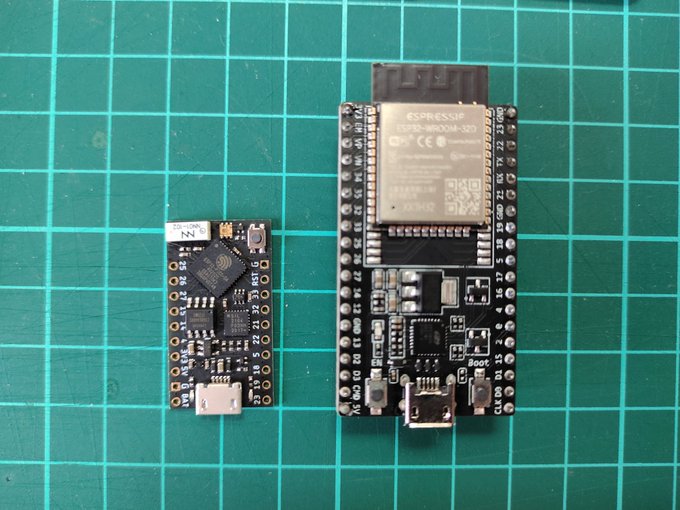
ESP32のおよそ半分の大きさです。で、肝心のスペックですが、こちらの通り。↓
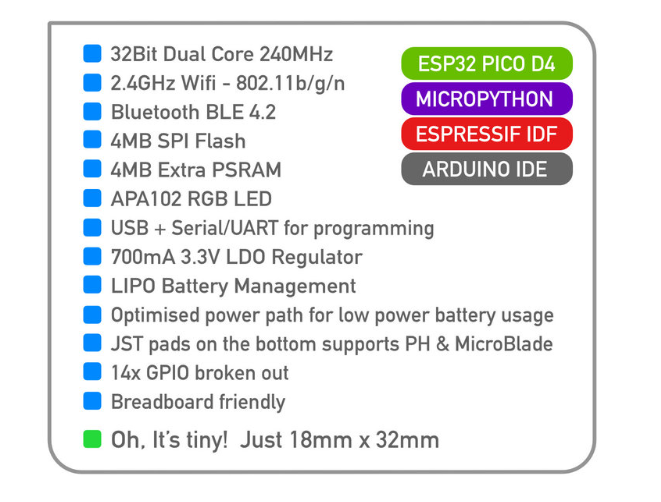
ESP32とほぼ同じでございます。ピン数が少し少ない程度じゃあないでしょうか。素晴らしい基板だと思います。まさにミニチュアの電子工作にはぴったりのマイコンボードといっていいでしょう。
ただし、お値段は¥6000程度しますので、少し割高です。
私の場合、アメリカから取り寄せたので運送料込で¥8000ぐらいいっちゃいました(-_-;)
それではtinypicoのセットアップに入りたいと思います。
セットアップ
micropythonはプリインストール済み
といわけで、PCにPythonの開発環境が整っていれば、速攻でthonny ideが認識しちゃいます。つまりファームウェアのセットアップする必要性は無し。(Cは分かんないけど。。)
ESP32だとファームウェアが無数に存在するので、結構ややこしい部分がありますので、これはありがたいですね。
tinypicoのセットアップに関しては、恐らくファームウェアの不具合で再インストールが必要な場合に初めて必要になってくると思われます。
それでは続きまして、簡単なプログラムを作成して、PCA9685経由でサーボモーターを制御してみたいと思います。
TinyPicoでサーボモーター制御
micropython
前回、構想でまとめた通り、M5stack core2をコントローラーにして、UDPでTinyPicoと通信させてみます。
プログラムはmicropythonで書きました。
プログラムはテスト用ですので、詳細は割愛させていただきます。
こんな感じで、ちゃんとI2Cで制御出来ています。↓
課題はPCA9685の大きさ
マイコン、サーボモーター、バッテリーといい感じで小さくまとめる事が出来ましたが、サーボモータードライバのPCA9685だけがどうにもなりません。(-_-;)下の通り、小型化を邪魔しています。
まあどうせ探せばネットであるだろうと思い込んでいたのですが、意外や意外でこれが無いんですよね。。
今思えば、もともとそんなに大きな基板じゃないですからね、さらに小さいってなると需要は無いんでしょうねきっと。私は喉から手が出るほど欲しいのですが。。
いい機会なので、自分で基板から作ってみようかなとも思ったのですが、とりあえず閃いた事があるので、まずはそれを実行してみようかと思います。
その内容については、、次回。

