
前回、2足歩行スタックチャンの構想についてまとめました。↓

今回は核となるボディの部分をCADでスケッチし、3Dプリンターで印刷、主要部品の格納までを進めようと思います。
それではまず、fusion360でボディをスケッチしていきます。
ボディ部スケッチ
サーボモータ、サーボドライバ格納部
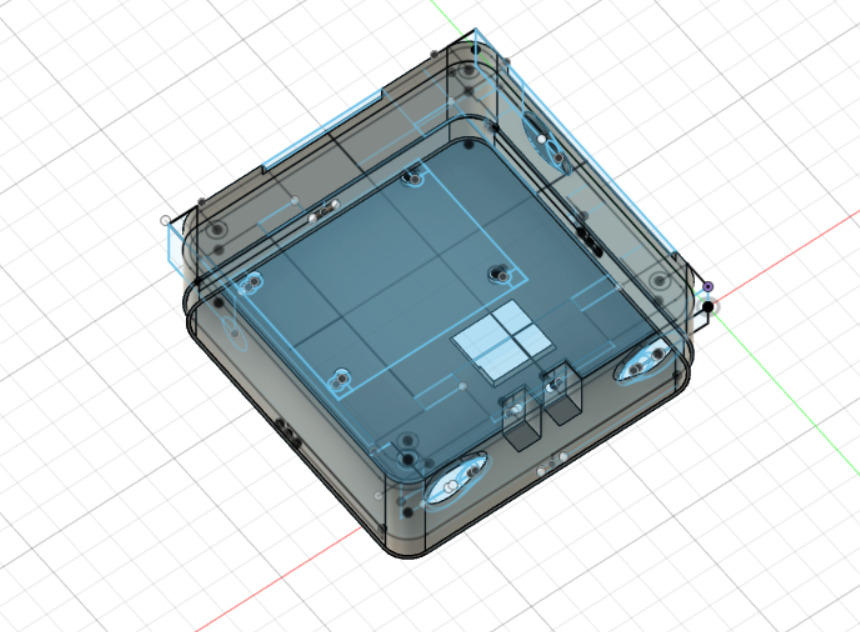
M5Stackの裏に取り付けるボディになります。
ここにサーボモーター、サーボドライバを格納できるようにデザインしています。
バッテリー格納部(背面部)
つづいてバッテリー格納部です。
これが背面にきますので、背中になります。
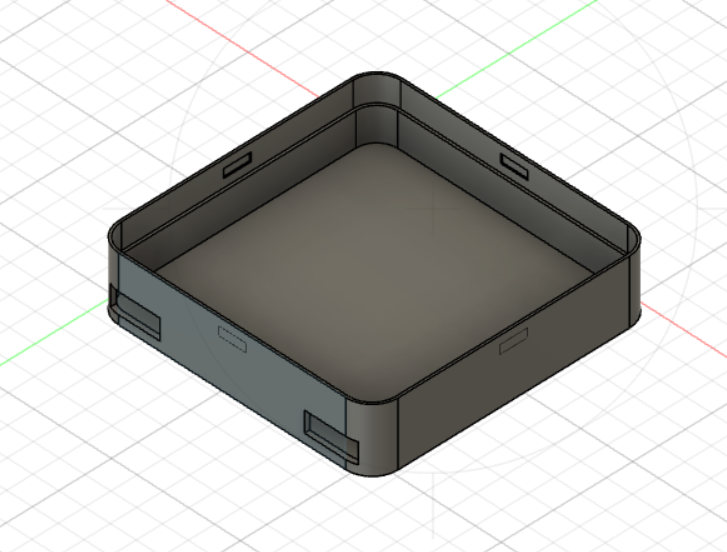
スケッチが出来たところで、3Dプリンタで印刷し、主要部品を格納してみます。
3Dプリンター
ボディ部の印刷、部品の格納
なんとか形になりました。隙間がけっこうあるので、工夫すればもっとサーボモータを追加する事が可能そうです。
続いて背面部。
バッテリー部の印刷、組立て
いい感じです。
次回は足を設計に入りたいと思います。

