
前回、3D CAD作成~3Dプリンター印刷までについてまとめました。↓

今回は印刷したものに基板を組み込んで、プログラムを書き込み、2足歩行ロボットを完成させる所までをまとめます。
なお、基板につきましては2022/1/31時点で日本国内にて技適が取れていないRaspberry ZERO2 W を使用しているため、シールドルームにて動作させてます。
そういった環境の無い方は、他のマイコンボードなどでお試し下さい。
目次
はじめに
仕様について
今回はロボットを「ブラウザ」と「Bluetooth」の2パターンで操作できるようにしています。
ブラウザから操作の流れとしましては、
スマホ(ブラウザ) ⇒ ラズパイ(Apach(HTML/css/js/python cgi)) ⇒(i2c) PCA9685 ⇒ サーボモーター
となります。WEBサーバーからpythonスクリプトを実行させるためにCGIの仕組みを利用しています。この方法についての詳細につきましては過去記事にてまとめています。↓

Bluetoothからの操作につきましては、単純にスマホとbluetoothペアリング後connectさせて、既存アプリをコントローラーにしています。↓
スマホ(bluetoothコントローラーアプリ) ⇒ ラズパイ(python) ⇒(i2c) PCA9686 ⇒ サーボモーター
スマホとラズパイのbluetooth接続方法につきましても過去記事にてまとめています。↓

マイコンボード について
組み込む基板についてはなるべくコンパクトな方がいいので、今回はRaspberry Pi ZERO2 W を選びました。
ZERO W でも試したのですが、いかんせんシングルコアで処理速度も遅い為、ブラウザからの操作時に無視できない遅延が発生しました。
これはZERO2に変更することで、見事に解消されました。4コアの恩恵でしょうか、非常に良いです、 Raspberry Pi ZERO2 W 。
使用部材
・Raspberry Pi ZERO2 W
・PCA9685
・M5CAMERA(BT内蔵)
・Lipo BT(公称:3.7V、容量:1100mAh、Cレート充電最大:1 放電最大:2)
・サーボモーター × 8
・LED,抵抗,導線
基板の組み込み
ピンソケットの取り外し
ピンソケットがあると結構場所を取るので、ロボット内に組み込みずらい場合は取り外します。しかしこれが結構厄介です。。
半田吸いとりのバキュームがあれば便利そうですが、なければ1本ずつ半田こてで温めながら抜き取っていきます。今回はRaspberry Pi ZERO2 WとPCA9685の両方、全て取り外しました。
抜き取ったあとは、使用するピンのスルーホールに詰まった半田を、半田吸いとり線で除去します。
ピンソケットは便利な反面、なにかに組み込む場合は無い方が良かったりしますね。
配線
ソケットを抜いたので、配線は半田で直でつなぎます。
Lipo BT(電源) ⇒ ラズパイ(i2c,3.3V,5V) ⇒ PCA9685 ⇒ サーボモーター × 8
ラズパイ(GPIO) ⇒ 抵抗、LED
ラズパイの電源5Vは、内部で3.3Vまで降圧しSoCが起動しているので、定格3.7V(満充電で約4.2V)のLipoでも消費電流値さえクリアしていれば使えます。サーボモーターに関しましては4.8V~が動作電圧ですので足りていませんが、とりあえず動いたので良しとしています。(汗)
セオリーではマイコンボードとサーボモーターで電源を分けますが、消費電流が合わせても1AいかなかったのでLipo1つでラズパイとPCA9685の2つの電源をまかなっています。ZEROシリーズは消費電流が少ないのも良いですね。
組み込み
ロボット内部に基板、BT、カメラを組み込みます。
カメラはラズパイでも良かったのですが、引き回しがきつかったのでM5cameraを使用しました。M5cameraは電池内蔵のもので、起動後にステーションモードでWIFI接続、WEBサーバーを立ててカメラ映像をストリーミング配信するようにプログラムしておきます。(プログラムは割愛します。)下の写真はM5cameraではなくunitV2です。
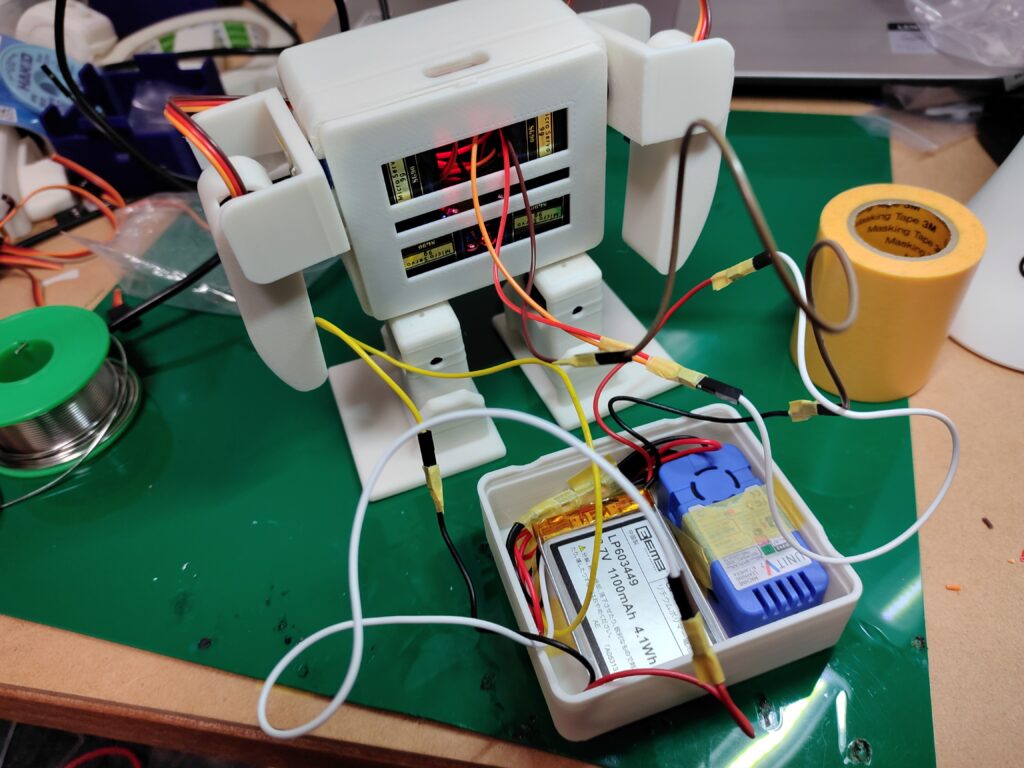
目ピカー
目を光らせたいので、抵抗とLEDを頭に仕込みます。
WEB操作のプログラム
HTML/css
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 |
<!DOCTYPE html> <html lang="ja"> <head> <meta charset="utf-8"> <title>テスト</title> <meta name="viewport" content="width=device-width, initial-scale=1"> <link rel="stylesheet" href="style.css"> </head> <body> <div class="cam"> <img src="M5cameraの公開サーバーアドレス"> </div> <main> <ul> <div class="bc"> <div class="b"> <li id="leftforward" class="ledoff">1</li> </div> <div class="a"> <li id="forward" class="ledoff">↑</li> </div> <div class="c"> <li id="rightforward" class="ledoff">2</li> </div> </div> <div class="bc"> <div class="b"> <li id="left" class="ledoff">←</li> </div> <div class="a"> <div class="z"> <div class="y"> <li id="l" class="ledoff">ON</li> </div> <div class="x"> <li id="r" class="ledoff">OFF</li> </div> </div> </div> <div class="c"> <li id="right" class="ledoff">→</li> </div> </div> <div class="bc"> <div class="b"> <li id="leftbackward" class="ledoff">4</li> </div> <div class="a"> <li id="backward" class="ledoff">↓</li> </div> <div class="c"> <li id="rightbackward" class="ledoff">4</li> </div> </div> </ul> </main> <script src="https://ajax.googleapis.com/ajax/libs/jquery/3.1.0/jquery.min.js"></script> <script src="main.js"></script> </body> </html> |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 |
* { margin: 0px; padding: 0px; } body { max-width: 600px; font-size: 25px; width: 100%; -webkit-touch-callout: none; -webkit-user-select: none; } img { width: 100%; } main { height: 40vh; background: skyblue; } ul { display: block; height: 40vh; list-style: none; padding-top: 10px; } .bc { display: flex; } .z { display: flex; } .a ,.bc, .d .y, .x { height: 12vh; } li { width: 90px; height: 90% ; margin-left: 5px; background: yellow; line-height: 80px; } #l, #r { width: 45px; margin-left: 5px; } .b { margin-left: auto; } .c { margin-right: auto; } ul li { text-align: center; } .a li, .b li, .c li, .d li { border: solid 1px; } .ledon { background: #f88888; } .n li { background: skyblue; } a:active { color: #ff2020; } |
javascript
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 |
$(function(){ let motor = "STOP"; function change_motor2() { motor = 'STOP'; } // 関数:モーターを動かすマクロ呼び出し function change_motor(typee) { motor = typee; if(typee == "FOWARD") { // 前進 //w().callMacro('FW'); console.log(typee); $.ajax({ url: 'cgi-bin/recieve.py', type: 'post', data: {name: 'hhhhh' } }).done(function(data){ change_motor2(); console.log(data); }).fail(function(){ console.log('failed'); }); } else if(typee == "BACKWARD") { //w().callMacro('BK'); console.log(typee); $.ajax({ url: 'cgi-bin/recieve.py', type: 'post', data: {name: 'iiii' } }).done(function(data){ change_motor2(); console.log(data); }).fail(function(){ console.log('failed'); }); } else if(typee == "RIGHT") { //w().callMacro('RT'); console.log(typee); $.ajax({ url: 'cgi-bin/recieve.py', type: 'post', data: {name: 'jjjj' } }).done(function(data){ change_motor2(); console.log(data); }).fail(function(){ console.log('failed'); }); } else if(typee == "LEFT") { //w().callMacro('LT'); console.log(typee); $.ajax({ url: 'cgi-bin/recieve.py', type: 'post', data: {name: 'kkkk' } }).done(function(data){ change_motor2(); console.log(data); }).fail(function(){ console.log('failed'); }); } else if(typee == "STOP") { //w().callMacro('ST'); console.log(typee); $.ajax({ url: 'cgi-bin/recieve.py', type: 'post', data: {name: 'ssss' } }); } else if(typee == "LEFTFORWARD") { //w().callMacro('ST'); console.log(typee); $.ajax({ url: 'cgi-bin/recieve.py', type: 'post', data: {name: 'qqqq' } }).done(function(data){ change_motor2(); console.log(data); }).fail(function(){ console.log('failed'); }); } else if(typee == "RIGHTFORWARD") { //w().callMacro('ST'); console.log(typee); $.ajax({ url: 'cgi-bin/recieve.py', type: 'post', data: {name: 'mmmm' } }).done(function(data){ change_motor2(); console.log(data); }).fail(function(){ console.log('failed'); }); } else if(typee == "L") { //w().callMacro('ST'); console.log(typee); $.ajax({ url: 'cgi-bin/recieve.py', type: 'post', data: {name: 'gggg' } }); } else if(typee == "R") { //w().callMacro('ST'); console.log(typee); $.ajax({ url: 'cgi-bin/recieve.py', type: 'post', data: {name: 'dddd' } }); } else if(typee == "LEFTBACKWARD") { //w().callMacro('ST'); console.log(typee); $.ajax({ url: 'cgi-bin/recieve.py', type: 'post', data: {name: 'oooo' } }).done(function(data){ change_motor2(); console.log(data); }).fail(function(){ console.log('failed'); }); } else if(typee == "RIGHTBACKWARD") { //w().callMacro('ST'); console.log(typee); $.ajax({ url: 'cgi-bin/recieve.py', type: 'post', data: {name: 'zzzz' } }).done(function(data){ change_motor2(); console.log(data); }).fail(function(){ console.log('failed'); }); } } // 「前進」ボタンが押されたときのイベント処理 $('#forward').bind('touchstart', function() { // 押されたとき if(motor == 'STOP') { $(this).addClass('ledon'); change_motor('FOWARD'); ff1 = setInterval(function(){ change_motor('FOWARD'); }, 2900); } }).bind('touchend', function() { // 離したとき $(this).removeClass('ledon'); //change_motor('STOP'); clearInterval(ff1); }); // 「後退」ボタンが押されたときのイベント処理 $('#backward').bind('touchstart', function() { if(motor == "STOP") { $(this).addClass('ledon'); change_motor('BACKWARD'); ff1 = setInterval(function(){ change_motor('BACKWARD'); }, 3000); } }).bind('touchend', function() { $(this).removeClass('ledon'); //change_motor('STOP'); clearInterval(ff1); }); // 「右」ボタンが押されたときのイベント処理 $('#right').bind('touchstart', function() { if(motor == "STOP") { $(this).addClass('ledon'); change_motor('RIGHT'); ff1 = setInterval(function(){ change_motor('RIGHT'); }, 1400); } }).bind('touchend', function() { $(this).removeClass('ledon'); //change_motor('STOP'); clearInterval(ff1); }); // 「左」ボタンが押されたときのイベント処理 $('#left').bind('touchstart', function() { if(motor == "STOP") { $(this).addClass('ledon'); change_motor('LEFT'); ff1 = setInterval(function(){ change_motor('LEFT'); }, 1400); } }).bind('touchend', function() { $(this).removeClass('ledon'); //change_motor('STOP'); clearInterval(ff1); }); $('#leftforward').bind('touchstart', function() { // 押されたとき if(motor == 'STOP') { $(this).addClass('ledon'); change_motor('LEFTFORWARD'); ff1 = setInterval(function(){ change_motor('LEFTFORWARD'); }, 4500); } }).bind('touchend', function() { // 離したとき $(this).removeClass('ledon'); //change_motor('STOP'); clearInterval(ff1); }); $('#rightforward').bind('touchstart', function() { // 押されたとき if(motor == 'STOP') { $(this).addClass('ledon'); change_motor('RIGHTFORWARD'); ff1 = setInterval(function(){ change_motor('RIGHTFORWARD'); }, 3000); } }).bind('touchend', function() { // 離したとき $(this).removeClass('ledon'); //change_motor('STOP'); clearInterval(ff1); }); $('#leftbackward').bind('touchstart', function() { // 押されたとき if(motor == 'STOP') { $(this).addClass('ledon'); change_motor('LEFTBACKWARD'); ff1 = setInterval(function(){ change_motor('LEFTBACKWARD'); }, 5500); } }).bind('touchend', function() { // 離したとき $(this).removeClass('ledon'); //change_motor('STOP'); clearInterval(ff1); }); $('#rightbackward').bind('touchstart', function() { // 押されたとき if(motor == 'STOP') { $(this).addClass('ledon'); change_motor('RIGHTBACKWARD'); ff1 = setInterval(function(){ change_motor('RIGHTBACKWARD'); }, 3000); } }).bind('touchend', function() { // 離したとき $(this).removeClass('ledon'); //change_motor('STOP'); clearInterval(ff1); }); $('#l').bind('touchstart', function() { // 押されたとき if(motor == 'STOP') { $(this).addClass('ledon'); change_motor('L'); } }).bind('touchend', function() { // 離したとき $(this).removeClass('ledon'); //change_motor('STOP'); change_motor2(); }); $('#r').bind('touchstart', function() { // 押されたとき if(motor == 'STOP') { $(this).addClass('ledon'); change_motor('R'); } }).bind('touchend', function() { // 離したとき $(this).removeClass('ledon'); //change_motor('STOP'); change_motor2(); }); }); |
python CGI
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 |
#!/usr/bin/python3 #! -*- coding: utf-8 -*- import time import cgi import Adafruit_PCA9685 import RPi.GPIO as GPIO GPIO.setmode(GPIO.BCM) LED_1 = 19 LED_2 = 26 GPIO.setup(LED_1, GPIO.OUT) GPIO.setup(LED_2, GPIO.OUT) form = cgi.FieldStorage() recieve = form.getvalue('name') pwm = Adafruit_PCA9685.PCA9685() pwm.set_pwm_freq(60) p = 410 n = 440 i = 375 t = 440 a = 190 b = 190 c = 230 d = 200 if recieve == 'hhhhh': while(n >= 360): #前進 pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) #time.sleep(1) n = n - 1 a = a - 1 b = b - 1 if t >= 360: t = t - 1 while(i <= 475): pwm.set_pwm(2, 0, i) time.sleep(0.0001) #time.sleep(1) i = i + 1 while(n <= 440): pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) #time.sleep(1) n = n + 1 a = a + 1 b = b + 1 if t <= 440: t = t + 1 #time.sleep(0.5) while(i >= 375): pwm.set_pwm(2, 0, i) time.sleep(0.0001) #time.sleep(1) i = i - 1 while(t <= 500): pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) #time.sleep(1) t = t + 1 a = a + 1 b = b + 1 if n <= 500: n = n + 1 while(p >= 310): pwm.set_pwm(0, 0, p) time.sleep(0.0001) #time.sleep(1) p = p - 1 while(t >= 440): pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) #time.sleep(1) t = t - 1 a = a - 1 b = b - 1 if n >= 420: n = n - 1 while(p <= 410): pwm.set_pwm(0, 0, p) time.sleep(0.0001) #time.sleep(1) p = p + 1 print('Content-type: text/html\n') print(recieve) print('ff') elif recieve == 'jjjj': while(n >= 360): #右旋回 pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) #time.sleep(1) n = n - 1 a = a + 1 b = b + 1 if t >= 360: t = t - 1 while(i >= 275): pwm.set_pwm(2, 0, i) time.sleep(0.0001) #time.sleep(1) i = i - 1 while(n <= 440): pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) #time.sleep(1) n = n + 1 a = a - 1 b = b - 1 if t <= 440: t = t + 1 while(i <= 375): pwm.set_pwm(2, 0, i) time.sleep(0.0001) #time.sleep(1) i = i + 1 print('Content-type: text/html\n') print(recieve) print("r") elif recieve == 'kkkk': while(t <= 500): #左旋回 pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) #time.sleep(1) t = t + 1 a = a - 1 b = b - 1 if n <= 510: n = n + 1 while(p <= 520): pwm.set_pwm(0, 0, p) time.sleep(0.0005) #time.sleep(1) p = p + 1 while(t >= 440): pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) #time.sleep(1) t = t - 1 a = a + 1 b = b + 1 if n >= 420: n = n - 1 while(p >= 410): pwm.set_pwm(0, 0, p) time.sleep(0.0005) #time.sleep(1) p = p - 1 print('Content-type: text/html\n') print(recieve) print('l') elif recieve == 'iiii': while(n >= 360): #後退 pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) n = n - 1 a = a + 1 b = b + 1 if t >= 360: t = t - 1 while(i >= 275): pwm.set_pwm(2, 0, i) time.sleep(0.0001) #time.sleep(1) i = i - 1 while(n <= 440): pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) #time.sleep(1) n = n + 1 a = a - 1 b = b - 1 if t <= 440: t = t + 1 while(i <= 375): pwm.set_pwm(2, 0, i) time.sleep(0.0001) #time.sleep(1) i = i + 1 while(t <= 500): pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) #time.sleep(1) t = t + 1 a = a - 1 b = b - 1 if n <= 500: n = n + 1 while(p <= 520): pwm.set_pwm(0, 0, p) time.sleep(0.0005) #time.sleep(1) p = p + 1 while(t >= 440): pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) #time.sleep(1) t = t - 1 a = a + 1 b = b + 1 if n >= 420: n = n - 1 while(p >= 420): pwm.set_pwm(0, 0, p) time.sleep(0.0005) #time.sleep(1) p = p - 1 print('Content-type: text/html\n') print(recieve) print('rt') elif recieve == 'qqqq': num = 0 while(num <= 3): num = num + 1 while(c >= 130): #1 pwm.set_pwm(6, 0, c) pwm.set_pwm(7, 0, d) time.sleep(0.0001) c = c - 1 d = d + 1 while(c <= 230): pwm.set_pwm(6, 0, c) pwm.set_pwm(7, 0, d) time.sleep(0.0001) c = c + 1 d = d - 1 print('Content-type: text/html\n') print(recieve) print('1') elif recieve == 'mmmm': #2 num = 0 while(a <= 290): pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) a = a + 1 b = b - 1 while(num <= 3): num = num + 1 while(c >= 130): pwm.set_pwm(6, 0, c) pwm.set_pwm(7, 0, d) time.sleep(0.0001) c = c - 1 d = d + 1 while(c <= 230): pwm.set_pwm(6, 0, c) pwm.set_pwm(7, 0, d) time.sleep(0.0001) c = c + 1 d = d - 1 while(a >= 190): pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) a = a - 1 b = b + 1 print('Content-type: text/html\n') print(recieve) print('2') elif recieve == 'oooo': #3 num = 0 while(n >= 340): pwm.set_pwm(1, 0, n) pwm.set_pwm(3, 0, t) time.sleep(0.0001) n = n - 1 t = t - 1 while(num <= 3): num = num + 1 while(c >= 130): pwm.set_pwm(6, 0, c) pwm.set_pwm(7, 0, d) time.sleep(0.0001) c = c - 1 d = d + 1 while(c <= 230): pwm.set_pwm(6, 0, c) pwm.set_pwm(7, 0, d) time.sleep(0.0001) c = c + 1 d = d - 1 while(n <= 440 ): pwm.set_pwm(1, 0, n) pwm.set_pwm(3, 0, t) time.sleep(0.0001) n = n + 1 t = t + 1 print('Content-type: text/html\n') print(recieve) print('3') elif recieve == 'zzzz': #4 num = 0 while(n <= 540): pwm.set_pwm(1, 0, n) pwm.set_pwm(3, 0, t) time.sleep(0.0001) n = n + 1 t = t + 1 while(num <= 3): num = num + 1 while(c >= 130): pwm.set_pwm(6, 0, c) pwm.set_pwm(7, 0, d) time.sleep(0.0001) c = c - 1 d = d + 1 while(c <= 230): pwm.set_pwm(6, 0, c) pwm.set_pwm(7, 0, d) time.sleep(0.0001) c = c + 1 d = d - 1 while(n >= 440 ): pwm.set_pwm(1, 0, n) pwm.set_pwm(3, 0, t) time.sleep(0.0001) n = n - 1 t = t - 1 print('Content-type: text/html\n') print(recieve) print('4') elif recieve == 'gggg': GPIO.output(LED_1,GPIO.HIGH) GPIO.output(LED_2,GPIO.HIGH) elif recieve == 'dddd': GPIO.output(LED_1,GPIO.LOW) GPIO.output(LED_2,GPIO.LOW) elif recieve == 'ssss': #GPIO.output(MOTOR_A1,GPIO.LOW) #GPIO.output(MOTOR_A2,GPIO.LOW) #GPIO.output(MOTOR_A3,GPIO.LOW) #GPIO.output(MOTOR_A4,GPIO.LOW) #pwm.set_pwm(0, 0, 375) #pwm.set_pwm(1, 0, 375) #pwm.set_pwm(2, 0, 375) #pwm.set_pwm(3, 0, 375) pass print('st') |
Bluetooth操作のプログラム
python
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 |
# -*- coding: utf-8 -*- import time import bluetooth import RPi.GPIO as GPIO import Adafruit_PCA9685 GPIO.setmode(GPIO.BCM) LED_1 = 19 LED_2 = 26 GPIO.setup(LED_1, GPIO.OUT) GPIO.setup(LED_2, GPIO.OUT) #form = cgi.FieldStorage() #recieve = form.getvalue('name') pwm = Adafruit_PCA9685.PCA9685() pwm.set_pwm_freq(60) p = 410 n = 440 i = 375 t = 440 a = 190 b = 190 c = 230 d = 200 PORT = 1 server_socket = bluetooth.BluetoothSocket(bluetooth.RFCOMM) print("connect...") server_socket.bind(("",PORT )) server_socket.listen(1) client_socket,address = server_socket.accept() print("connection success!!") while 1: try: data = client_socket.recv(1024) data = data.decode() print(data) print('\n') except: print("error") print('\n') client_socket.close() server_socket.close() break if "h" in data: while(n >= 360): #前進 pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) #time.sleep(1) n = n - 1 a = a - 1 b = b - 1 if t >= 360: t = t - 1 while(i <= 475): pwm.set_pwm(2, 0, i) time.sleep(0.0001) #time.sleep(1) i = i + 1 while(n <= 440): pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) #time.sleep(1) n = n + 1 a = a + 1 b = b + 1 if t <= 440: t = t + 1 #time.sleep(0.5) while(i >= 375): pwm.set_pwm(2, 0, i) time.sleep(0.0001) #time.sleep(1) i = i - 1 while(t <= 500): pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) #time.sleep(1) t = t + 1 a = a + 1 b = b + 1 if n <= 500: n = n + 1 while(p >= 310): pwm.set_pwm(0, 0, p) time.sleep(0.0001) #time.sleep(1) p = p - 1 while(t >= 440): pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) #time.sleep(1) t = t - 1 a = a - 1 b = b - 1 if n >= 420: n = n - 1 while(p <= 410): pwm.set_pwm(0, 0, p) time.sleep(0.0001) #time.sleep(1) p = p + 1 #print('Content-type: text/html\n') #print(recieve) #print('ff') elif "j" in data: while(n >= 360): #右旋回 pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) #time.sleep(1) n = n - 1 a = a + 1 b = b + 1 if t >= 360: t = t - 1 while(i >= 275): pwm.set_pwm(2, 0, i) time.sleep(0.0001) #time.sleep(1) i = i - 1 while(n <= 440): pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) #time.sleep(1) n = n + 1 a = a - 1 b = b - 1 if t <= 440: t = t + 1 while(i <= 375): pwm.set_pwm(2, 0, i) time.sleep(0.0001) #time.sleep(1) i = i + 1 #print('Content-type: text/html\n') #print(recieve) #print("r") elif "k" in data: while(t <= 500): #左旋回 pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) #time.sleep(1) t = t + 1 a = a - 1 b = b - 1 if n <= 510: n = n + 1 while(p <= 520): pwm.set_pwm(0, 0, p) time.sleep(0.0005) #time.sleep(1) p = p + 1 while(t >= 440): pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) #time.sleep(1) t = t - 1 a = a + 1 b = b + 1 if n >= 420: n = n - 1 while(p >= 410): pwm.set_pwm(0, 0, p) time.sleep(0.0005) #time.sleep(1) p = p - 1 #print('Content-type: text/html\n') #print(recieve) #rint('l') elif "i" in data: while(n >= 360): #後退 pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) n = n - 1 a = a + 1 b = b + 1 if t >= 360: t = t - 1 while(i >= 275): pwm.set_pwm(2, 0, i) time.sleep(0.0001) #time.sleep(1) i = i - 1 while(n <= 440): pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) #time.sleep(1) n = n + 1 a = a - 1 b = b - 1 if t <= 440: t = t + 1 while(i <= 375): pwm.set_pwm(2, 0, i) time.sleep(0.0001) #time.sleep(1) i = i + 1 while(t <= 500): pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) #time.sleep(1) t = t + 1 a = a - 1 b = b - 1 if n <= 500: n = n + 1 while(p <= 520): pwm.set_pwm(0, 0, p) time.sleep(0.0005) #time.sleep(1) p = p + 1 while(t >= 440): pwm.set_pwm(3, 0, t) pwm.set_pwm(1, 0, n) pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) #time.sleep(1) t = t - 1 a = a + 1 b = b + 1 if n >= 420: n = n - 1 while(p >= 420): pwm.set_pwm(0, 0, p) time.sleep(0.0005) #time.sleep(1) p = p - 1 #print('Content-type: text/html\n') #print(recieve) #print('rt') elif "q" in data: num = 0 while(num <= 3): num = num + 1 while(c >= 130): #1 pwm.set_pwm(6, 0, c) pwm.set_pwm(7, 0, d) time.sleep(0.0001) c = c - 1 d = d + 1 while(c <= 230): pwm.set_pwm(6, 0, c) pwm.set_pwm(7, 0, d) time.sleep(0.0001) c = c + 1 d = d - 1 #print('Content-type: text/html\n') #print(recieve) #print('1') elif "m" in data: #2 num = 0 while(a <= 290): pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) a = a + 1 b = b - 1 while(num <= 3): num = num + 1 while(c >= 130): pwm.set_pwm(6, 0, c) pwm.set_pwm(7, 0, d) time.sleep(0.0001) c = c - 1 d = d + 1 while(c <= 230): pwm.set_pwm(6, 0, c) pwm.set_pwm(7, 0, d) time.sleep(0.0001) c = c + 1 d = d - 1 while(a >= 190): pwm.set_pwm(4, 0, a) pwm.set_pwm(5, 0, b) time.sleep(0.0001) a = a - 1 b = b + 1 #print('Content-type: text/html\n') #print(recieve) #print('2') elif "o" in data: #3 num = 0 while(n >= 340): pwm.set_pwm(1, 0, n) pwm.set_pwm(3, 0, t) time.sleep(0.0001) n = n - 1 t = t - 1 while(num <= 3): num = num + 1 while(c >= 130): pwm.set_pwm(6, 0, c) pwm.set_pwm(7, 0, d) time.sleep(0.0001) c = c - 1 d = d + 1 while(c <= 230): pwm.set_pwm(6, 0, c) pwm.set_pwm(7, 0, d) time.sleep(0.0001) c = c + 1 d = d - 1 while(n <= 440 ): pwm.set_pwm(1, 0, n) pwm.set_pwm(3, 0, t) time.sleep(0.0001) n = n + 1 t = t + 1 #print('Content-type: text/html\n') #print(recieve) #print('3') elif "z" in data: #4 num = 0 while(n <= 540): pwm.set_pwm(1, 0, n) pwm.set_pwm(3, 0, t) time.sleep(0.0001) n = n + 1 t = t + 1 while(num <= 3): num = num + 1 while(c >= 130): pwm.set_pwm(6, 0, c) pwm.set_pwm(7, 0, d) time.sleep(0.0001) c = c - 1 d = d + 1 while(c <= 230): pwm.set_pwm(6, 0, c) pwm.set_pwm(7, 0, d) time.sleep(0.0001) c = c + 1 d = d - 1 while(n >= 440 ): pwm.set_pwm(1, 0, n) pwm.set_pwm(3, 0, t) time.sleep(0.0001) n = n - 1 t = t - 1 #print('Content-type: text/html\n') #print(recieve) #print('4') elif "g" in data: GPIO.output(LED_1,GPIO.HIGH) GPIO.output(LED_2,GPIO.HIGH) elif "d" in data: GPIO.output(LED_1,GPIO.LOW) GPIO.output(LED_2,GPIO.LOW) elif "s" in data: #GPIO.output(MOTOR_A1,GPIO.LOW) #GPIO.output(MOTOR_A2,GPIO.LOW) #GPIO.output(MOTOR_A3,GPIO.LOW) #GPIO.output(MOTOR_A4,GPIO.LOW) #pwm.set_pwm(0, 0, 375) #pwm.set_pwm(1, 0, 375) #pwm.set_pwm(2, 0, 375) #pwm.set_pwm(3, 0, 375) pass print('st') |
完成
こんな感じになります。↓

