前回、PCA9685の小型化加工についてまとめました。↓

これで内部に収める部品は全て小型化できましたので、今回はロボットの筐体を作成していきたいと思います。
まず、3D CADでスケッチを書きます。ソフトはfusion360を使いました。
ちなみに、前回ロボットを作った時は、採寸するのに定規を使ってかなり苦労した(ミリ単位がズレにズレる。。)ので、今回はデジタルノギスを購入しました。
結論、ノギスは必須です。定規は無謀です。
3D CADスケッチ
動体部
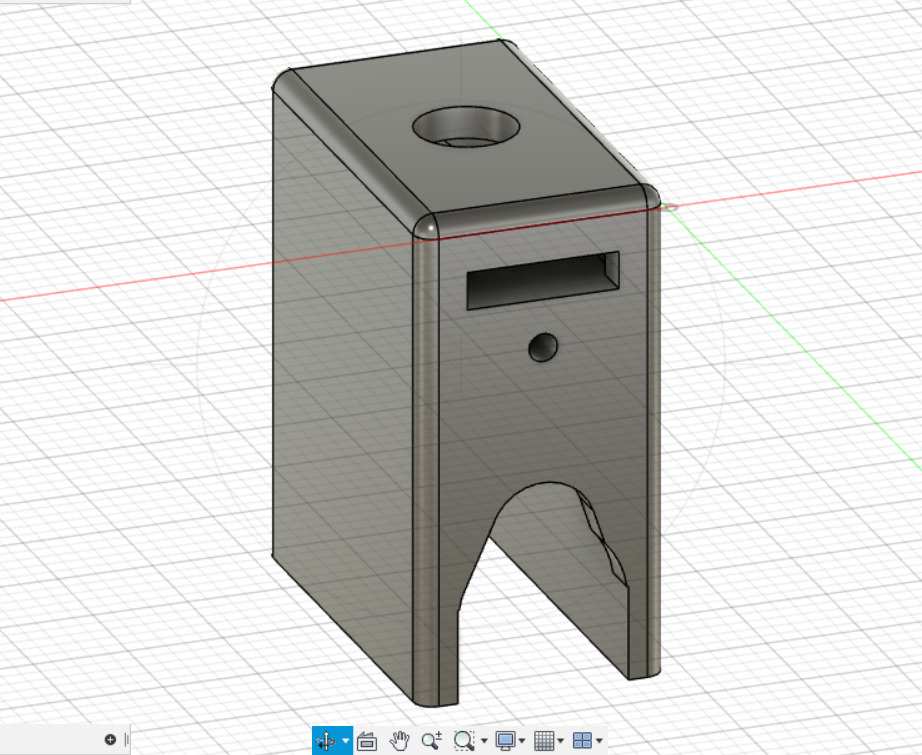
サーボ格納部
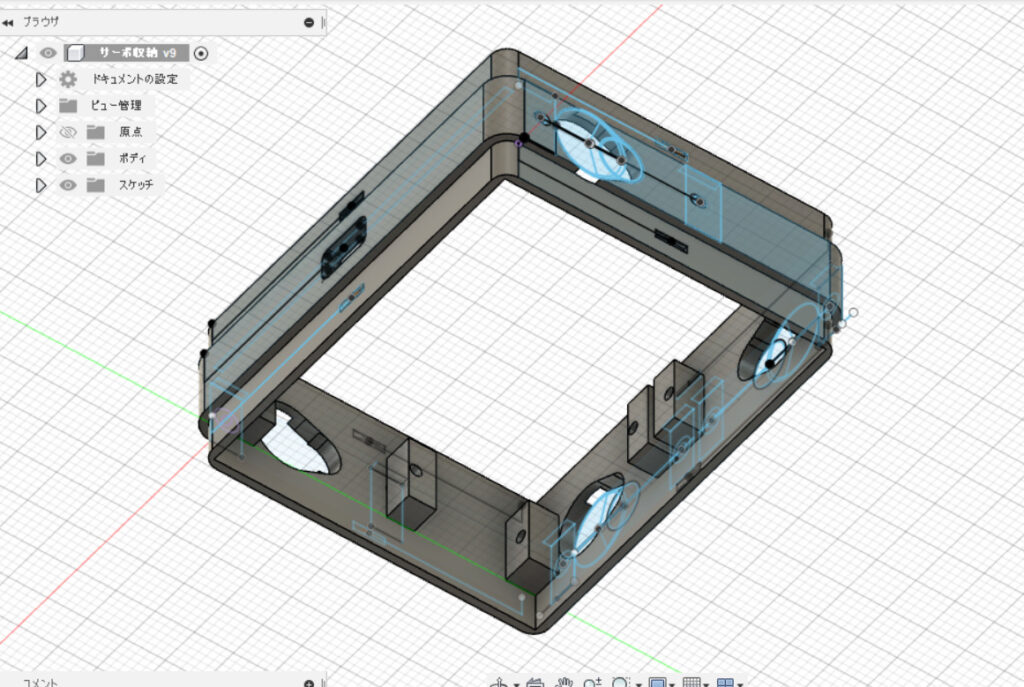
ミニサーボを採寸し、しっかりと固定できるようにしました。
ここが動体の真ん中に来る予定です。四角のサイズは、基板やらがギリギリ入るサイズまで小さくさせています。
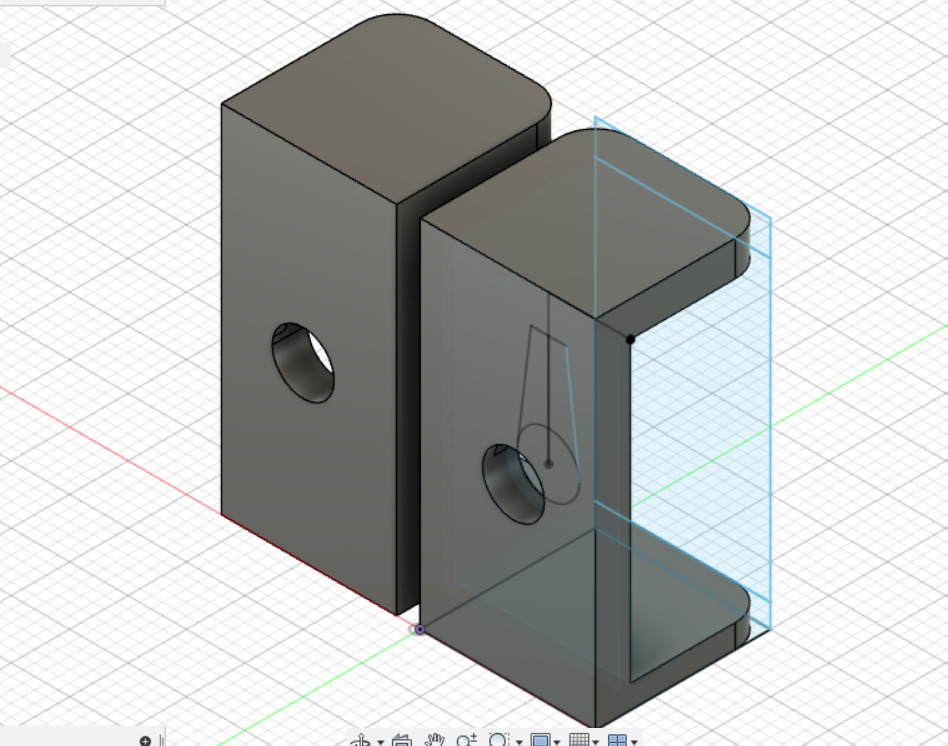
フロントカバー
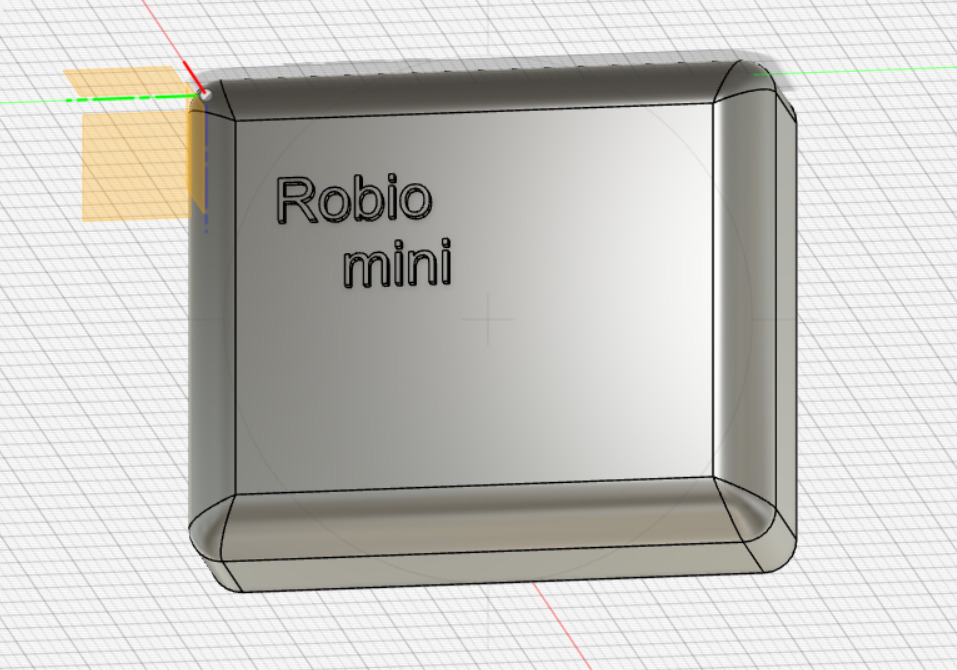
サーボ格納部のフロントカバーになります。
多少奥行を持たせているので、ここにLipo BTを入れる予定。
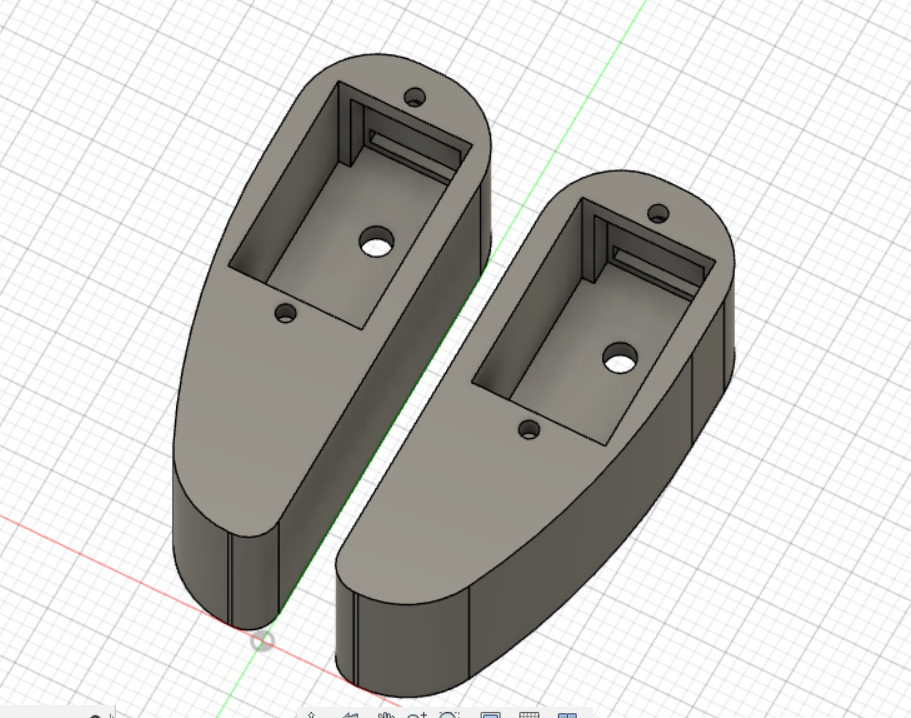
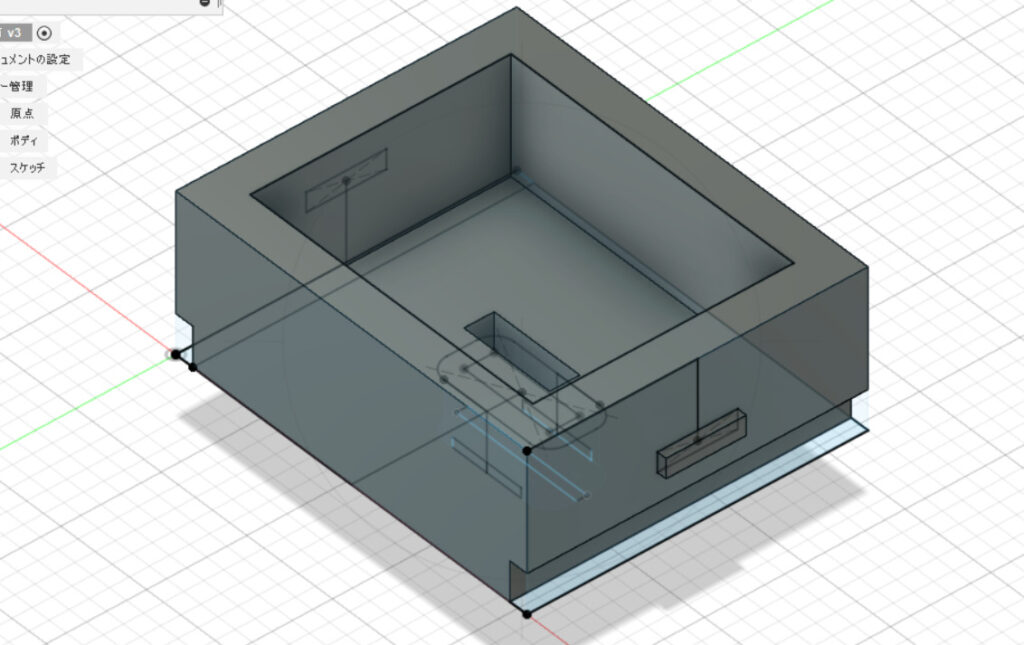
バックカバー
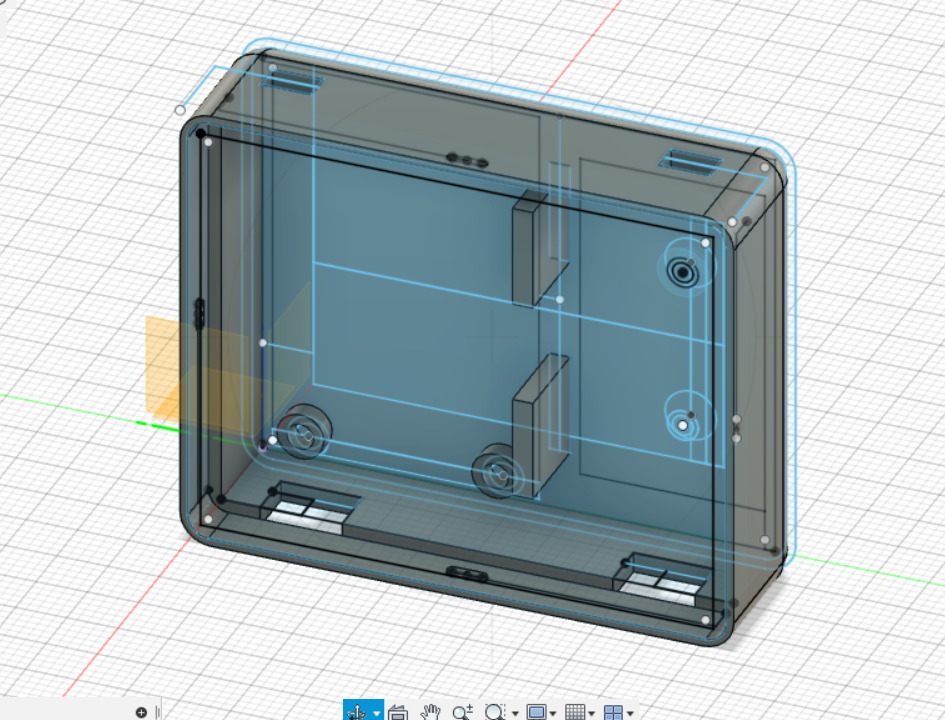
サーボ格納部のバックカバーになります。ここにTinyPicoとPCA9685を入れる予定です。
基板はビス止め出来るようにし、ショート防止の為に敷居も設けました。
後はサーボのケーブルを通す穴を空けています。
足部分
動体接続部
動体足側のサーボに接続する部分です。水平回転の足ですね。
またフット用のサーボモータを格納できるようにしています。
フット部
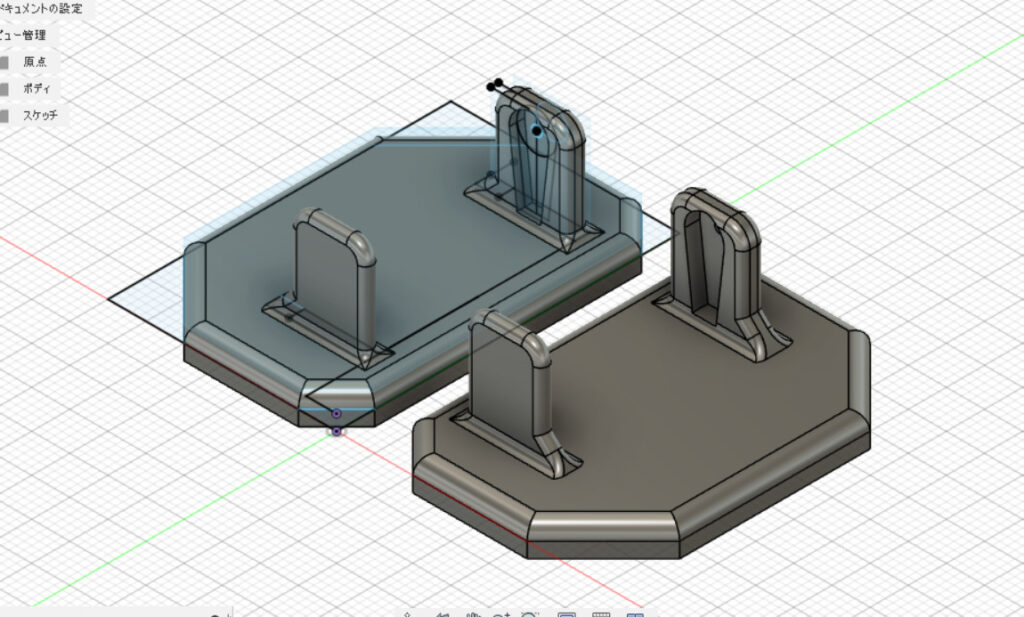
フット用のサーボ回転部を取り付けできるようにしています。
足を上げる動作に必須です。
腕部分
ショルダー部
動体腕のサーボに接続する部分です。歩行時の腕の振りになります。
腕部
腕にもサーボを格納し、これで羽を広げるような向きに腕を動かす予定です。
ヘッド部分
ネック部
動体の頭部に接続します。頭部には後ほどLEDを仕込みたいので、作業しやすいように首と頭を分けました。
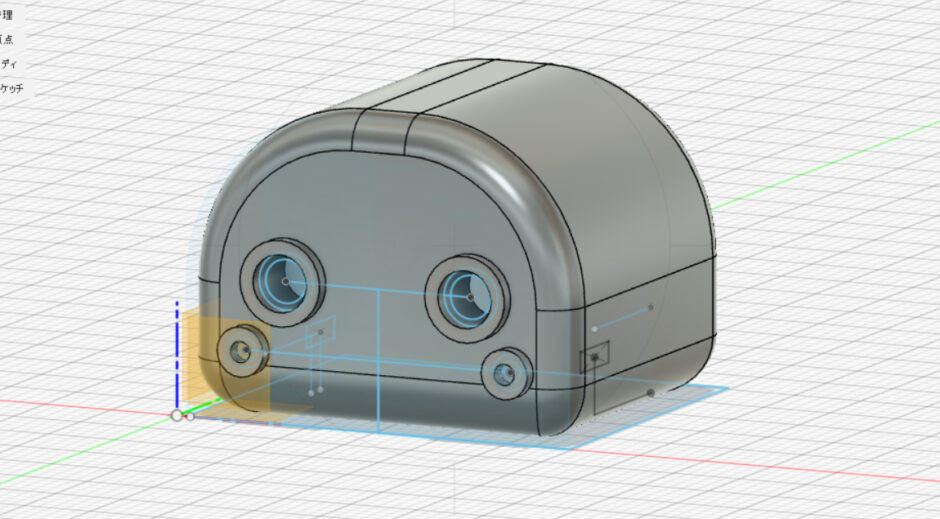
ヘッド部
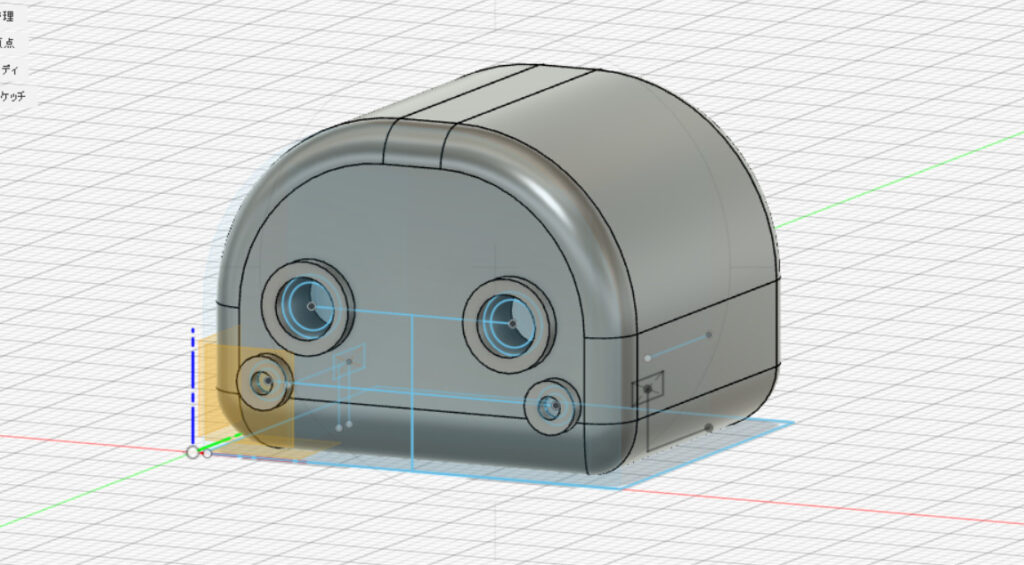
頭です。目をくり抜いていますので、ここにLEDをぶち込む予定。
3Dプリンターで印刷
印刷後の仮組み
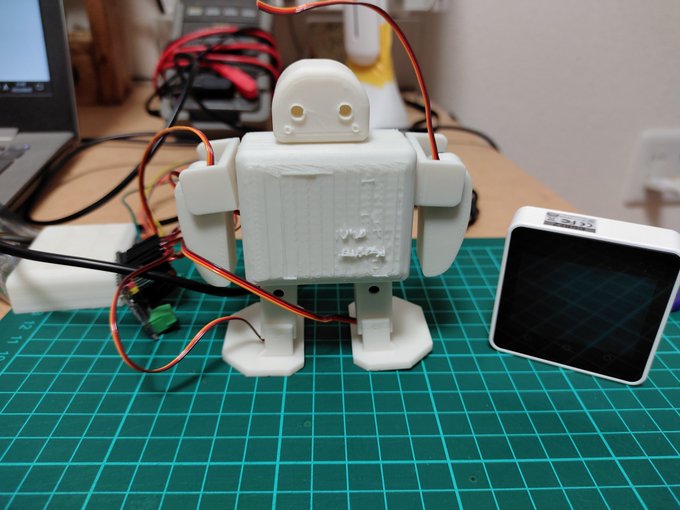
とりあえず印刷出来ましたので、部品は入れずに仮で組み立てました。
横のM5Stackと比べると大きさが分かると思います。手乗りサイズといっても良いでしょう。
次回は内部に部品を格納し、地獄の配線処理を行い、動作確認まで持っていきたいと思います。

